mirror of
https://github.com/youngyangyang04/leetcode-master.git
synced 2025-07-07 07:35:35 +08:00
Update
This commit is contained in:
@ -87,7 +87,7 @@ bool backtracking(vector<vector<char>>& board)
|
||||
|
||||
|
||||
|
||||
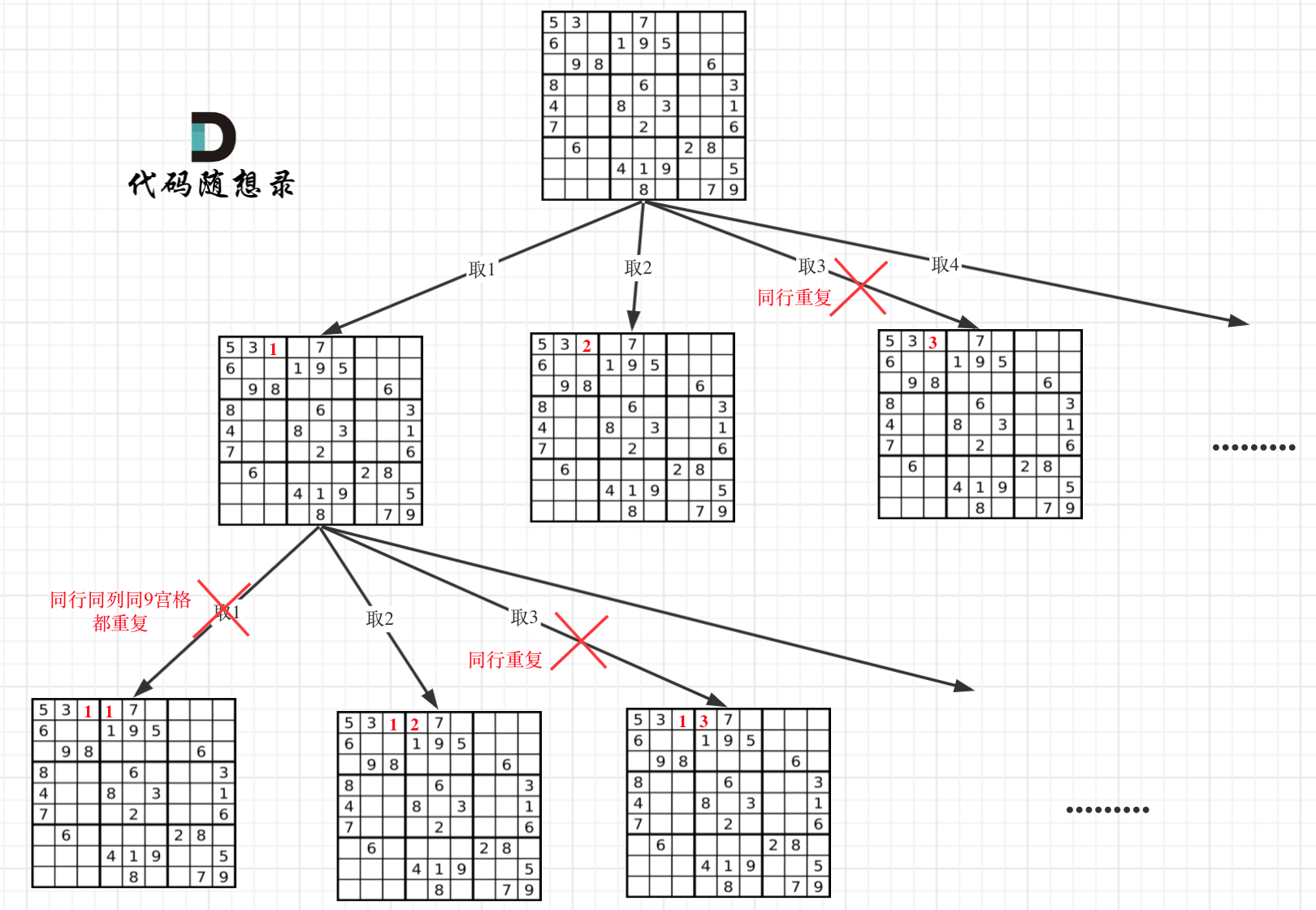
在树形图中可以看出我们需要的是一个二维的递归(也就是两个for循环嵌套着递归)
|
||||
在树形图中可以看出我们需要的是一个二维的递归 (一行一列)
|
||||
|
||||
**一个for循环遍历棋盘的行,一个for循环遍历棋盘的列,一行一列确定下来之后,递归遍历这个位置放9个数字的可能性!**
|
||||
|
||||
|
||||
@ -4,7 +4,7 @@
|
||||
</a>
|
||||
<p align="center"><strong><a href="https://mp.weixin.qq.com/s/tqCxrMEU-ajQumL1i8im9A">参与本项目</a>,贡献其他语言版本的代码,拥抱开源,让更多学习算法的小伙伴们收益!</strong></p>
|
||||
|
||||
> 相对于[贪心算法:跳跃游戏](https://mp.weixin.qq.com/s/606_N9j8ACKCODoCbV1lSA)难了不少,做好心里准备!
|
||||
> 相对于[贪心算法:跳跃游戏](https://mp.weixin.qq.com/s/606_N9j8ACKCODoCbV1lSA)难了不少,做好心理准备!
|
||||
|
||||
# 45.跳跃游戏 II
|
||||
|
||||
|
||||
1230
problems/0743.网络延迟时间.md
Normal file
1230
problems/0743.网络延迟时间.md
Normal file
File diff suppressed because it is too large
Load Diff
44
problems/0787.K站中转内最便宜的航班.md
Normal file
44
problems/0787.K站中转内最便宜的航班.md
Normal file
@ -0,0 +1,44 @@
|
||||
|
||||
|
||||
```CPP
|
||||
class Solution {
|
||||
public:
|
||||
int findCheapestPrice(int n, vector<vector<int>>& flights, int src, int dst, int k) {
|
||||
vector<int> minDist(n , INT_MAX/2);
|
||||
minDist[src] = 0;
|
||||
vector<int> minDist_copy(n); // 用来记录每一次遍历的结果
|
||||
for (int i = 1; i <= k + 1; i++) {
|
||||
minDist_copy = minDist; // 获取上一次计算的结果
|
||||
for (auto &f : flights) {
|
||||
int from = f[0];
|
||||
int to = f[1];
|
||||
int price = f[2];
|
||||
if (minDist[to] > minDist_copy[from] + price) minDist[to] = minDist_copy[from] + price;
|
||||
}
|
||||
|
||||
}
|
||||
int result = minDist[dst] == INT_MAX/2 ? -1 : minDist[dst];
|
||||
return result;
|
||||
}
|
||||
};
|
||||
```
|
||||
|
||||
```CPP
|
||||
class Solution {
|
||||
public:
|
||||
int findCheapestPrice(int n, vector<vector<int>>& flights, int src, int dst, int k) {
|
||||
vector<int> minDist(n , INT_MAX/2);
|
||||
minDist[src] = 0;
|
||||
for (int i = 1; i <= k + 1; i++) {
|
||||
for (auto &f : flights) {
|
||||
int from = f[0];
|
||||
int to = f[1];
|
||||
int price = f[2];
|
||||
if (minDist[to] > minDist[from] + price) minDist[to] = minDist[from] + price;
|
||||
}
|
||||
}
|
||||
int result = minDist[dst] == INT_MAX/2 ? -1 : minDist[dst];
|
||||
return result;
|
||||
}
|
||||
};
|
||||
```
|
||||
651
problems/kama47.参会dijkstra堆.md
Normal file
651
problems/kama47.参会dijkstra堆.md
Normal file
@ -0,0 +1,651 @@
|
||||
|
||||
# dijkstra(堆优化版)精讲
|
||||
|
||||
[题目链接](https://kamacoder.com/problempage.php?pid=1047)
|
||||
|
||||
【题目描述】
|
||||
|
||||
小明是一位科学家,他需要参加一场重要的国际科学大会,以展示自己的最新研究成果。
|
||||
|
||||
小明的起点是第一个车站,终点是最后一个车站。然而,途中的各个车站之间的道路状况、交通拥堵程度以及可能的自然因素(如天气变化)等不同,这些因素都会影响每条路径的通行时间。
|
||||
|
||||
小明希望能选择一条花费时间最少的路线,以确保他能够尽快到达目的地。
|
||||
|
||||
【输入描述】
|
||||
|
||||
第一行包含两个正整数,第一个正整数 N 表示一共有 N 个公共汽车站,第二个正整数 M 表示有 M 条公路。
|
||||
|
||||
接下来为 M 行,每行包括三个整数,S、E 和 V,代表了从 S 车站可以单向直达 E 车站,并且需要花费 V 单位的时间。
|
||||
|
||||
【输出描述】
|
||||
|
||||
输出一个整数,代表小明在途中和其他科学家和科研团队交流所花费的最少时间。
|
||||
|
||||
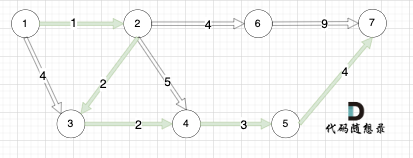
输入示例
|
||||
|
||||
```
|
||||
7 9
|
||||
1 2 1
|
||||
1 3 4
|
||||
2 3 2
|
||||
2 4 5
|
||||
3 4 2
|
||||
4 5 3
|
||||
2 6 4
|
||||
5 7 4
|
||||
6 7 9
|
||||
```
|
||||
|
||||
输出示例:12
|
||||
|
||||
【提示信息】
|
||||
|
||||
能够到达的情况:
|
||||
|
||||
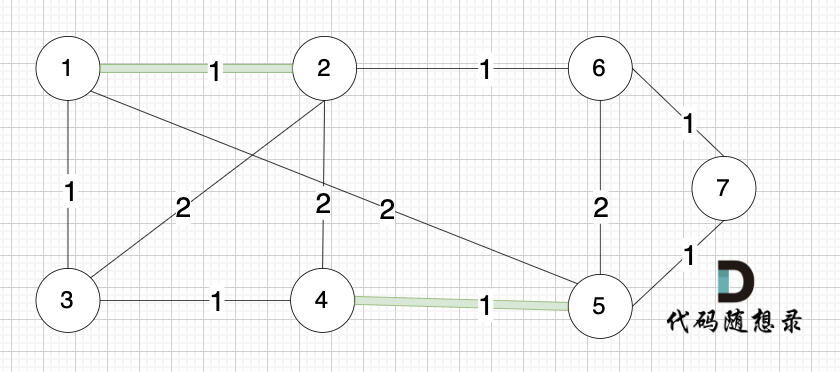
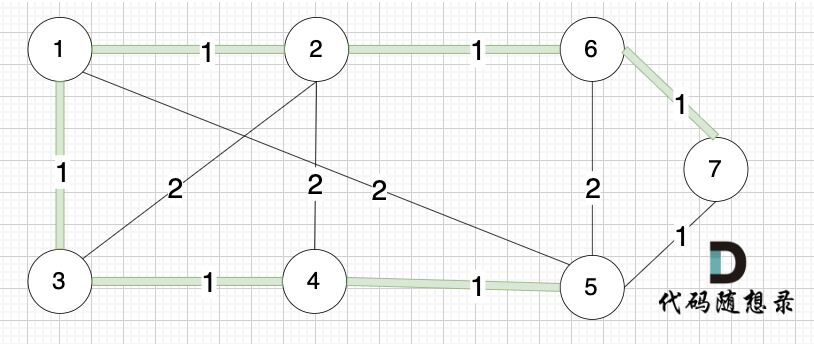
如下图所示,起始车站为 1 号车站,终点车站为 7 号车站,绿色路线为最短的路线,路线总长度为 12,则输出 12。
|
||||
|
||||

|
||||
|
||||
不能到达的情况:
|
||||
|
||||
如下图所示,当从起始车站不能到达终点车站时,则输出 -1。
|
||||
|
||||

|
||||
|
||||
数据范围:
|
||||
|
||||
1 <= N <= 500;
|
||||
1 <= M <= 5000;
|
||||
|
||||
|
||||
## 思路
|
||||
|
||||
> 本篇我们来讲解 堆优化版dijkstra,看本篇之前,一定要先看 我讲解的 朴素版dijkstra,否则本篇会有部分内容看不懂。
|
||||
|
||||
在上一篇中,我们讲解了朴素版的dijkstra,该解法的时间复杂度为 O(n^2),可以看出时间复杂度 只和 n (节点数量)有关系。
|
||||
|
||||
如果n很大的话,我们可以换一个角度来优先性能。
|
||||
|
||||
在 讲解 最小生成树的时候,我们 讲了两个算法,[prim算法](https://mp.weixin.qq.com/s/yX936hHC6Z10K36Vm1Wl9w)(从点的角度来求最小生成树)、[Kruskal算法](https://mp.weixin.qq.com/s/rUVaBjCES_4eSjngceT5bw)(从边的角度来求最小生成树)
|
||||
|
||||
这么在n 很大的时候,也有另一个思考维度,即:从边的数量出发。
|
||||
|
||||
当 n 很大,边 的数量 也很多的时候(稠密图),那么 上述解法没问题。
|
||||
|
||||
但 n 很大,边 的数量 很小的时候(稀疏图),是不是可以换成从边的角度来求最短路呢?
|
||||
|
||||
毕竟边的数量少。
|
||||
|
||||
有的录友可能会想,n (节点数量)很大,边不就多吗? 怎么会边的数量少呢?
|
||||
|
||||
别忘了,谁也没有规定 节点之间一定要有边连接着,例如有一万个节点,只有一条边,这也是一张图。
|
||||
|
||||
了解背景之后,再来看 解法思路。
|
||||
|
||||
### 图的存储
|
||||
|
||||
首先是 图的存储。
|
||||
|
||||
关于图的存储 主流有两种方式: 邻接矩阵和邻接表
|
||||
|
||||
#### 邻接矩阵
|
||||
|
||||
邻接矩阵 使用 二维数组来表示图结构。 邻接矩阵是从节点的角度来表示图,有多少节点就申请多大的二维数组。
|
||||
|
||||
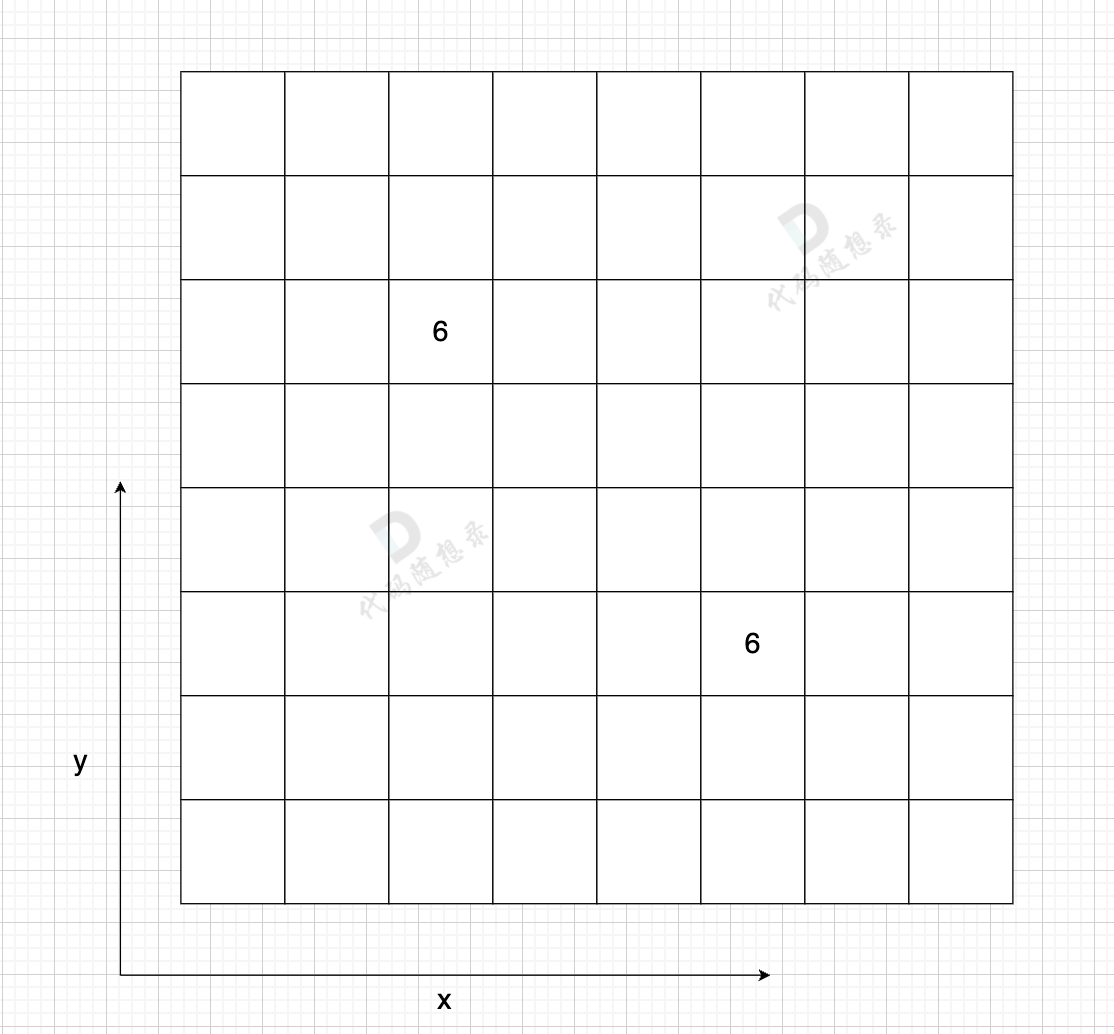
例如: grid[2][5] = 6,表示 节点 2 链接 节点5 为有向图,节点2 指向 节点5,边的权值为6 (套在题意里,可能是距离为6 或者 消耗为6 等等)
|
||||
|
||||
如果想表示无向图,即:grid[2][5] = 6,grid[5][2] = 6,表示节点2 与 节点5 相互连通,权值为6。
|
||||
|
||||
|
||||
如图:
|
||||
|
||||
|
||||
|
||||
在一个 n (节点数)为8 的图中,就需要申请 8 * 8 这么大的空间,有一条双向边,即:grid[2][5] = 6,grid[5][2] = 6
|
||||
|
||||
这种表达方式(邻接矩阵) 在 边少,节点多的情况下,会导致申请过大的二维数组,造成空间浪费。
|
||||
|
||||
而且在寻找节点链接情况的时候,需要遍历整个矩阵,即 n * n 的时间复杂度,同样造成时间浪费。
|
||||
|
||||
邻接矩阵的优点:
|
||||
|
||||
* 表达方式简单,易于理解
|
||||
* 检查任意两个顶点间是否存在边的操作非常快
|
||||
* 适合稠密图,在边数接近顶点数平方的图中,邻接矩阵是一种空间效率较高的表示方法。
|
||||
|
||||
缺点:
|
||||
|
||||
* 遇到稀疏图,会导致申请过大的二维数组造成空间浪费 且遍历 边 的时候需要遍历整个n * n矩阵,造成时间浪费
|
||||
|
||||
#### 邻接表
|
||||
|
||||
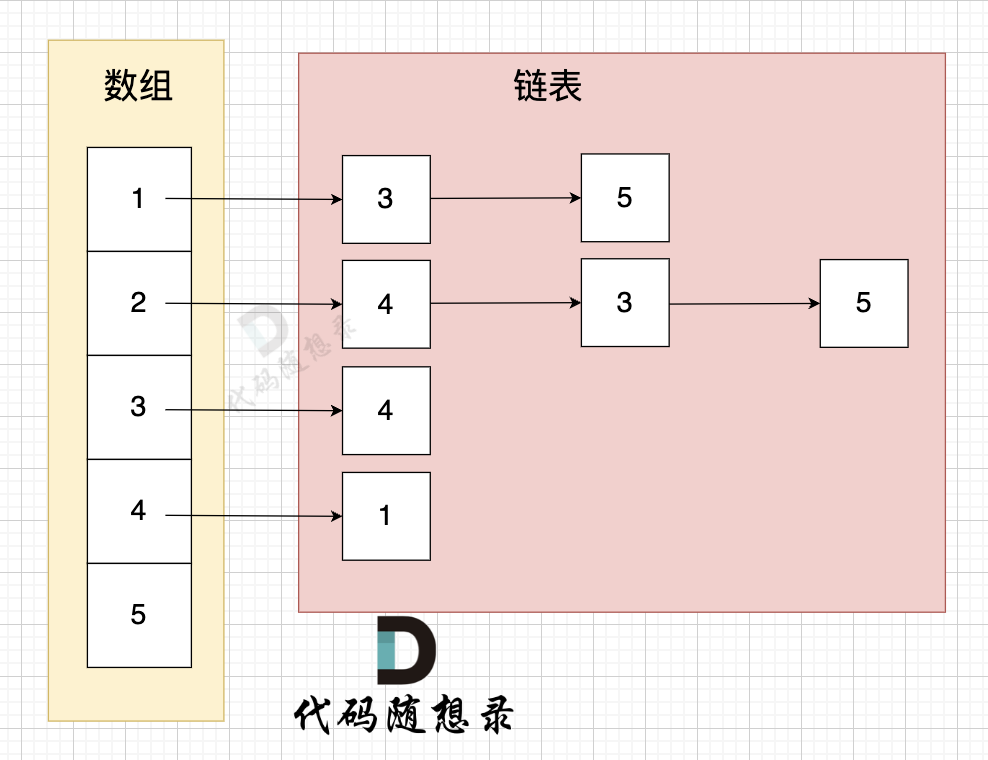
邻接表 使用 数组 + 链表的方式来表示。 邻接表是从边的数量来表示图,有多少边 才会申请对应大小的链表。
|
||||
|
||||
邻接表的构造如图:
|
||||
|
||||
|
||||
|
||||
这里表达的图是:
|
||||
|
||||
* 节点1 指向 节点3 和 节点5
|
||||
* 节点2 指向 节点4、节点3、节点5
|
||||
* 节点3 指向 节点4,节点4指向节点1。
|
||||
|
||||
有多少边 邻接表才会申请多少个对应的链表节点。
|
||||
|
||||
从图中可以直观看出 使用 数组 + 链表 来表达 边的链接情况 。
|
||||
|
||||
邻接表的优点:
|
||||
|
||||
* 对于稀疏图的存储,只需要存储边,空间利用率高
|
||||
* 遍历节点链接情况相对容易
|
||||
|
||||
缺点:
|
||||
|
||||
* 检查任意两个节点间是否存在边,效率相对低,需要 O(V)时间,V表示某节点链接其他节点的数量。
|
||||
* 实现相对复杂,不易理解
|
||||
|
||||
#### 本题图的存储
|
||||
|
||||
接下来我们继续按照稀疏图的角度来分析本题。
|
||||
|
||||
在第一个版本的实现思路中,我们提到了三部曲:
|
||||
|
||||
1. 第一步,选源点到哪个节点近且该节点未被访问过
|
||||
2. 第二步,该最近节点被标记访问过
|
||||
3. 第三步,更新非访问节点到源点的距离(即更新minDist数组)
|
||||
|
||||
在第一个版本的代码中,这三部曲是套在一个 for 循环里,为什么?
|
||||
|
||||
因为我们是从节点的角度来解决问题。
|
||||
|
||||
三部曲中第一步(选源点到哪个节点近且该节点未被访问过),这个操作本身需要for循环遍历 minDist 来寻找最近的节点。
|
||||
|
||||
同时我们需要 遍历所有 未访问过的节点,所以 我们从 节点角度出发,代码会有两层for循环,代码是这样的: (注意代码中的注释,标记两层for循环的用处)
|
||||
|
||||
```CPP
|
||||
|
||||
for (int i = 1; i <= n; i++) { // 遍历所有节点,第一层for循环
|
||||
|
||||
int minVal = INT_MAX;
|
||||
int cur = 1;
|
||||
|
||||
// 1、选距离源点最近且未访问过的节点 , 第二层for循环
|
||||
for (int v = 1; v <= n; ++v) {
|
||||
if (!visited[v] && minDist[v] < minVal) {
|
||||
minVal = minDist[v];
|
||||
cur = v;
|
||||
}
|
||||
}
|
||||
|
||||
visited[cur] = true; // 2、标记该节点已被访问
|
||||
|
||||
// 3、第三步,更新非访问节点到源点的距离(即更新minDist数组)
|
||||
for (int v = 1; v <= n; v++) {
|
||||
if (!visited[v] && grid[cur][v] != INT_MAX && minDist[cur] + grid[cur][v] < minDist[v]) {
|
||||
minDist[v] = minDist[cur] + grid[cur][v];
|
||||
}
|
||||
}
|
||||
|
||||
}
|
||||
```
|
||||
|
||||
那么当从 边 的角度出发, 在处理 三部曲里的第一步(选源点到哪个节点近且该节点未被访问过)的时候 ,我们可以不用去遍历所有节点了。
|
||||
|
||||
而且 直接把 边(带权值)加入到 小顶堆(利用堆来自动排序),那么每次我们从 堆顶里 取出 边 自然就是 距离源点最近的节点所在的边。
|
||||
|
||||
这样我们就不需要两层for循环来寻找最近的节点了。
|
||||
|
||||
了解了大体思路,我们再来看代码实现。
|
||||
|
||||
首先是 如何使用 邻接表来表述图结构,这是摆在很多录友面前的第一个难题。
|
||||
|
||||
邻接表用 数组+链表 来表示,代码如下:(C++中 vector 为数组,list 为链表, 定义了 n+1 这么大的数组空间)
|
||||
|
||||
```CPP
|
||||
vector<list<int>> grid(n + 1);
|
||||
```
|
||||
|
||||
不少录友,不知道 如何定义的数据结构,怎么表示邻接表的,我来给大家画一个图:
|
||||
|
||||

|
||||
|
||||
图中邻接表表示:
|
||||
|
||||
* 节点1 指向 节点3 和 节点5
|
||||
* 节点2 指向 节点4、节点3、节点5
|
||||
* 节点3 指向 节点4
|
||||
* 节点4 指向 节点1
|
||||
|
||||
大家发现图中的边没有权值,而本题中 我们的边是有权值的,权值怎么表示?在哪里表示?
|
||||
|
||||
所以 在`vector<list<int>> grid(n + 1);` 中 就不能使用int了,而是需要一个键值对 来存两个数字,一个数表示节点,一个数表示 指向该节点的这条边的权值。
|
||||
|
||||
那么 代码可以改成这样: (pair 为键值对,可以存放两个int)
|
||||
|
||||
```CPP
|
||||
vector<list<pair<int,int>>> grid(n + 1);
|
||||
```
|
||||
|
||||
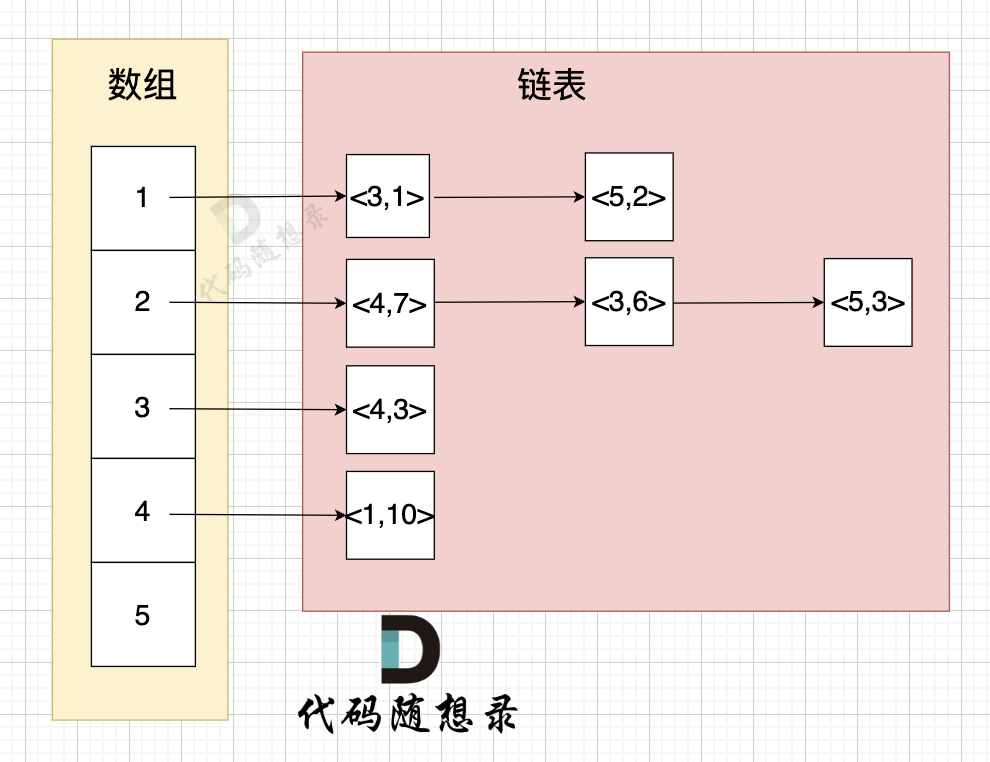
举例来给大家展示 该代码表达的数据 如下:
|
||||
|
||||
|
||||
|
||||
* 节点1 指向 节点3 权值为 1
|
||||
* 节点1 指向 节点5 权值为 2
|
||||
* 节点2 指向 节点4 权值为 7
|
||||
* 节点2 指向 节点3 权值为 6
|
||||
* 节点2 指向 节点5 权值为 3
|
||||
* 节点3 指向 节点4 权值为 3
|
||||
* 节点5 指向 节点1 权值为 10
|
||||
|
||||
这样 我们就把图中权值表示出来了。
|
||||
|
||||
但是在代码中 使用 `pair<int, int>` 很容易让我们搞混了,第一个int 表示什么,第二个int表示什么,导致代码可读性很差,或者说别人看你的代码看不懂。
|
||||
|
||||
那么 可以 定一个类 来取代 `pair<int, int>`
|
||||
|
||||
类(或者说是结构体)定义如下:
|
||||
|
||||
```CPP
|
||||
struct Edge {
|
||||
int to; // 邻接顶点
|
||||
int val; // 边的权重
|
||||
|
||||
Edge(int t, int w): to(t), val(w) {} // 构造函数
|
||||
};
|
||||
```
|
||||
|
||||
这个类里有两个成员变量,有对应的命名,这样不容易搞混 两个int的含义。
|
||||
|
||||
所以 本题中邻接表的定义如下:
|
||||
|
||||
```CPP
|
||||
struct Edge {
|
||||
int to; // 链接的节点
|
||||
int val; // 边的权重
|
||||
|
||||
Edge(int t, int w): to(t), val(w) {} // 构造函数
|
||||
};
|
||||
|
||||
vector<list<Edge>> grid(n + 1); // 邻接表
|
||||
|
||||
```
|
||||
|
||||
(我们在下面的讲解中会直接使用这个邻接表的代码表示方式)
|
||||
|
||||
### 堆优化细节
|
||||
|
||||
其实思路依然是 dijkstra 三部曲:
|
||||
|
||||
1. 第一步,选源点到哪个节点近且该节点未被访问过
|
||||
2. 第二步,该最近节点被标记访问过
|
||||
3. 第三步,更新非访问节点到源点的距离(即更新minDist数组)
|
||||
|
||||
只不过之前是 通过遍历节点来遍历边,通过两层for循环来寻找距离源点最近节点。 这次我们直接遍历边,且通过堆来对边进行排序,达到直接选择距离源点最近节点。
|
||||
|
||||
先来看一下针对这三部曲,如果用 堆来优化。
|
||||
|
||||
那么三部曲中的第一步(选源点到哪个节点近且该节点未被访问过),我们如何选?
|
||||
|
||||
我们要选择距离源点近的节点(即:该边的权值最小),所以 我们需要一个 小顶堆 来帮我们对边的权值排序,每次从小顶堆堆顶 取边就是权值最小的边。
|
||||
|
||||
C++定义小顶堆,可以用优先级队列实现,代码如下:
|
||||
|
||||
```CPP
|
||||
// 小顶堆
|
||||
class mycomparison {
|
||||
public:
|
||||
bool operator()(const pair<int, int>& lhs, const pair<int, int>& rhs) {
|
||||
return lhs.second > rhs.second;
|
||||
}
|
||||
};
|
||||
// 优先队列中存放 pair<节点编号,源点到该节点的权值>
|
||||
priority_queue<pair<int, int>, vector<pair<int, int>>, mycomparison> pq;
|
||||
```
|
||||
|
||||
(`pair<int, int>`中 第二个int 为什么要存 源点到该节点的权值,因为 这个小顶堆需要按照权值来排序)
|
||||
|
||||
|
||||
有了小顶堆自动对边的权值排序,那我们只需要直接从 堆里取堆顶元素(小顶堆中,最小的权值在上面),就可以取到离源点最近的节点了 (未访问过的节点,不会加到堆里进行排序)
|
||||
|
||||
所以三部曲中的第一步,我们不用 for循环去遍历,直接取堆顶元素:
|
||||
|
||||
```CPP
|
||||
// pair<节点编号,源点到该节点的权值>
|
||||
pair<int, int> cur = pq.top(); pq.pop();
|
||||
|
||||
```
|
||||
|
||||
第二步(该最近节点被标记访问过) 这个就是将 节点做访问标记,和 朴素dijkstra 一样 ,代码如下:
|
||||
|
||||
```CPP
|
||||
// 2. 第二步,该最近节点被标记访问过
|
||||
visited[cur.first] = true;
|
||||
|
||||
```
|
||||
|
||||
(`cur.first` 是指取 `pair<int, int>` 里的第一个int,即节点编号 )
|
||||
|
||||
第三步(更新非访问节点到源点的距离),这里的思路 也是 和朴素dijkstra一样的。
|
||||
|
||||
但很多录友对这里是最懵的,主要是因为两点:
|
||||
|
||||
* 没有理解透彻 dijkstra 的思路
|
||||
* 没有理解 邻接表的表达方式
|
||||
|
||||
我们来回顾一下 朴素dijkstra 在这一步的代码和思路(如果没看过我讲解的朴素版dijkstra,这里会看不懂)
|
||||
|
||||
```CPP
|
||||
|
||||
// 3、第三步,更新非访问节点到源点的距离(即更新minDist数组)
|
||||
for (int v = 1; v <= n; v++) {
|
||||
if (!visited[v] && grid[cur][v] != INT_MAX && minDist[cur] + grid[cur][v] < minDist[v]) {
|
||||
minDist[v] = minDist[cur] + grid[cur][v];
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
其中 for循环是用来做什么的? 是为了 找到 节点cur 链接指向了哪些节点,因为使用邻接矩阵的表达方式 所以把所有节点遍历一遍。
|
||||
|
||||
而在邻接表中,我们可以以相对高效的方式知道一个节点链接指向哪些节点。
|
||||
|
||||
再回顾一下邻接表的构造(数组 + 链表):
|
||||
|
||||

|
||||
|
||||
假如 加入的cur 是节点 2, 那么 grid[2] 表示的就是图中第二行链表。 (grid数组的构造我们在 上面 「图的存储」中讲过)
|
||||
|
||||
所以在邻接表中,我们要获取 节点cur 链接指向哪些节点,就是遍历 grid[cur节点编号] 这个链表。
|
||||
|
||||
这个遍历方式,C++代码如下:
|
||||
|
||||
```CPP
|
||||
for (Edge edge : grid[cur.first])
|
||||
```
|
||||
|
||||
(如果不知道 Edge 是什么,看上面「图的存储」中邻接表的讲解)
|
||||
|
||||
`cur.first` 就是cur节点编号, 参考上面pair的定义: pair<节点编号,源点到该节点的权值>
|
||||
|
||||
接下来就是更新 非访问节点到源点的距离,代码实现和 朴素dijkstra 是一样的,代码如下:
|
||||
|
||||
```CPP
|
||||
// 3. 第三步,更新非访问节点到源点的距离(即更新minDist数组)
|
||||
for (Edge edge : grid[cur.first]) { // 遍历 cur指向的节点,cur指向的节点为 edge
|
||||
// cur指向的节点edge.to,这条边的权值为 edge.val
|
||||
if (!visited[edge.to] && minDist[cur.first] + edge.val < minDist[edge.to]) { // 更新minDist
|
||||
minDist[edge.to] = minDist[cur.first] + edge.val;
|
||||
pq.push(pair<int, int>(edge.to, minDist[edge.to]));
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
但为什么思路一样,有的录友能写出朴素dijkstra,但堆优化这里的逻辑就是写不出来呢?
|
||||
|
||||
**主要就是因为对邻接表的表达方式不熟悉**!
|
||||
|
||||
以上代码中,cur 链接指向的节点编号 为 edge.to, 这条边的权值为 edge.val ,如果对这里模糊的就再回顾一下 Edge的定义:
|
||||
|
||||
```CPP
|
||||
struct Edge {
|
||||
int to; // 邻接顶点
|
||||
int val; // 边的权重
|
||||
|
||||
Edge(int t, int w): to(t), val(w) {} // 构造函数
|
||||
};
|
||||
```
|
||||
|
||||
确定该节点没有被访问过,`!visited[edge.to]` , 目前 源点到cur.first的最短距离(minDist) + cur.first 到 edge.to 的距离 (edge.val) 是否 小于 minDist已经记录的 源点到 edge.to 的距离 (minDist[edge.to])
|
||||
|
||||
如果是的话,就开始更新操作。
|
||||
|
||||
即:
|
||||
|
||||
```CPP
|
||||
if (!visited[edge.to] && minDist[cur.first] + edge.val < minDist[edge.to]) { // 更新minDist
|
||||
minDist[edge.to] = minDist[cur.first] + edge.val;
|
||||
pq.push(pair<int, int>(edge.to, minDist[edge.to])); // 由于cur节点的加入,而新链接的边,加入到优先级队里中
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
同时,由于cur节点的加入,源点又有可以新链接到的边,将这些边加入到优先级队里中。
|
||||
|
||||
|
||||
以上代码思路 和 朴素版dijkstra 是一样一样的,主要区别是两点:
|
||||
|
||||
* 邻接表的表示方式不同
|
||||
* 使用优先级队列(小顶堆)来对新链接的边排序
|
||||
|
||||
### 代码实现
|
||||
|
||||
堆优化dijkstra完整代码如下:
|
||||
|
||||
```CPP
|
||||
#include <iostream>
|
||||
#include <vector>
|
||||
#include <list>
|
||||
#include <queue>
|
||||
#include <climits>
|
||||
using namespace std;
|
||||
// 小顶堆
|
||||
class mycomparison {
|
||||
public:
|
||||
bool operator()(const pair<int, int>& lhs, const pair<int, int>& rhs) {
|
||||
return lhs.second > rhs.second;
|
||||
}
|
||||
};
|
||||
// 定义一个结构体来表示带权重的边
|
||||
struct Edge {
|
||||
int to; // 邻接顶点
|
||||
int val; // 边的权重
|
||||
|
||||
Edge(int t, int w): to(t), val(w) {} // 构造函数
|
||||
};
|
||||
|
||||
int main() {
|
||||
int n, m, p1, p2, val;
|
||||
cin >> n >> m;
|
||||
|
||||
vector<list<Edge>> grid(n + 1);
|
||||
|
||||
for(int i = 0; i < m; i++){
|
||||
cin >> p1 >> p2 >> val;
|
||||
// p1 指向 p2,权值为 val
|
||||
grid[p1].push_back(Edge(p2, val));
|
||||
|
||||
}
|
||||
|
||||
int start = 1; // 起点
|
||||
int end = n; // 终点
|
||||
|
||||
// 存储从源点到每个节点的最短距离
|
||||
std::vector<int> minDist(n + 1, INT_MAX);
|
||||
|
||||
// 记录顶点是否被访问过
|
||||
std::vector<bool> visited(n + 1, false);
|
||||
|
||||
// 优先队列中存放 pair<节点,源点到该节点的权值>
|
||||
priority_queue<pair<int, int>, vector<pair<int, int>>, mycomparison> pq;
|
||||
|
||||
|
||||
// 初始化队列,源点到源点的距离为0,所以初始为0
|
||||
pq.push(pair<int, int>(start, 0));
|
||||
|
||||
minDist[start] = 0; // 起始点到自身的距离为0
|
||||
|
||||
while (!pq.empty()) {
|
||||
// 1. 第一步,选源点到哪个节点近且该节点未被访问过 (通过优先级队列来实现)
|
||||
// <节点, 源点到该节点的距离>
|
||||
pair<int, int> cur = pq.top(); pq.pop();
|
||||
|
||||
if (visited[cur.first]) continue;
|
||||
|
||||
// 2. 第二步,该最近节点被标记访问过
|
||||
visited[cur.first] = true;
|
||||
|
||||
// 3. 第三步,更新非访问节点到源点的距离(即更新minDist数组)
|
||||
for (Edge edge : grid[cur.first]) { // 遍历 cur指向的节点,cur指向的节点为 edge
|
||||
// cur指向的节点edge.to,这条边的权值为 edge.val
|
||||
if (!visited[edge.to] && minDist[cur.first] + edge.val < minDist[edge.to]) { // 更新minDist
|
||||
minDist[edge.to] = minDist[cur.first] + edge.val;
|
||||
pq.push(pair<int, int>(edge.to, minDist[edge.to]));
|
||||
}
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
if (minDist[end] == INT_MAX) cout << -1 << endl; // 不能到达终点
|
||||
else cout << minDist[end] << endl; // 到达终点最短路径
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
* 时间复杂度:O(ElogE) E 为边的数量
|
||||
* 空间复杂度:O(N + E) N 为节点的数量
|
||||
|
||||
堆优化的时间复杂度 只和边的数量有关 和节点数无关,在 优先级队列中 放的也是边。
|
||||
|
||||
以上代码中,`while (!pq.empty())` 里套了 `for (Edge edge : grid[cur.first])`
|
||||
|
||||
`for` 里 遍历的是 当前节点 cur 所连接边。
|
||||
|
||||
那 当前节点cur 所连接的边 也是不固定的, 这就让大家分不清,这时间复杂度究竟是多少?
|
||||
|
||||
其实 `for (Edge edge : grid[cur.first])` 里最终的数据走向 是 给队列里添加边。
|
||||
|
||||
那么跳出局部代码,整个队列 一定是 所有边添加了一次,同时也弹出了一次。
|
||||
|
||||
所以边添加一次时间复杂度是 O(E), `while (!pq.empty())` 里每次都要弹出一个边来进行操作,在优先级队列(小顶堆)中 弹出一个元素的时间复杂度是 O(logE) ,这是堆排序的时间复杂度。
|
||||
|
||||
(当然小顶堆里 是 添加元素的时候 排序,还是 取数元素的时候排序,这个无所谓,时间复杂度都是O(E),总是是一定要排序的,而小顶堆里也不会滞留元素,有多少元素添加 一定就有多少元素弹出)
|
||||
|
||||
所以 该算法整体时间复杂度为 O(ElogE)
|
||||
|
||||
网上的不少分析 会把 n (节点的数量)算进来,这个分析是有问题的,举一个极端例子,在n 为 10000,且是有一条边的 图里,以上代码,大家感觉执行了多少次?
|
||||
|
||||
`while (!pq.empty())` 中的 pq 存的是边,其实只执行了一次。
|
||||
|
||||
所以该算法时间复杂度 和 节点没有关系。
|
||||
|
||||
至于空间复杂度,邻接表是 数组 + 链表 数组的空间 是 N ,有E条边 就申请对应多少个链表节点,所以是 复杂度是 N + E
|
||||
|
||||
## 拓展
|
||||
|
||||
当然也有录友可能想 堆优化dijkstra 中 我为什么一定要用邻接表呢,我就用邻接矩阵 行不行 ?
|
||||
|
||||
也行的。
|
||||
|
||||
但 正是因为稀疏图,所以我们使用堆优化的思路, 如果我们还用 邻接矩阵 去表达这个图的话,就是 一个高效的算法 使用了低效的数据结构,那么 整体算法效率 依然是低的。
|
||||
|
||||
如果还不清楚为什么要使用 邻接表,可以再看看上面 我在 「图的存储」标题下的讲解。
|
||||
|
||||
这里我也给出 邻接矩阵版本的堆优化dijkstra代码:
|
||||
|
||||
```CPP
|
||||
#include <iostream>
|
||||
#include <vector>
|
||||
#include <list>
|
||||
#include <climits>
|
||||
using namespace std;
|
||||
// 小顶堆
|
||||
class mycomparison {
|
||||
public:
|
||||
bool operator()(const pair<int, int>& lhs, const pair<int, int>& rhs) {
|
||||
return lhs.second > rhs.second;
|
||||
}
|
||||
};
|
||||
|
||||
int main() {
|
||||
int n, m, p1, p2, val;
|
||||
cin >> n >> m;
|
||||
|
||||
vector<vector<int>> grid(n + 1, vector<int>(n + 1, INT_MAX));
|
||||
|
||||
for(int i = 0; i < m; i++){
|
||||
cin >> p1 >> p2 >> val;
|
||||
// p1 指向 p2,权值为 val
|
||||
grid[p1][p2] = val;
|
||||
}
|
||||
|
||||
int start = 1; // 起点
|
||||
int end = n; // 终点
|
||||
|
||||
// 存储从源点到每个节点的最短距离
|
||||
std::vector<int> minDist(n + 1, INT_MAX);
|
||||
|
||||
// 记录顶点是否被访问过
|
||||
std::vector<bool> visited(n + 1, false);
|
||||
|
||||
// 优先队列中存放 pair<节点,源点到该节点的距离>
|
||||
priority_queue<pair<int, int>, vector<pair<int, int>>, mycomparison> pq;
|
||||
|
||||
|
||||
// 初始化队列,源点到源点的距离为0,所以初始为0
|
||||
pq.push(pair<int, int>(start, 0));
|
||||
|
||||
minDist[start] = 0; // 起始点到自身的距离为0
|
||||
|
||||
while (!pq.empty()) {
|
||||
// <节点, 源点到该节点的距离>
|
||||
// 1、选距离源点最近且未访问过的节点
|
||||
pair<int, int> cur = pq.top(); pq.pop();
|
||||
|
||||
if (visited[cur.first]) continue;
|
||||
|
||||
visited[cur.first] = true; // 2、标记该节点已被访问
|
||||
|
||||
// 3、第三步,更新非访问节点到源点的距离(即更新minDist数组)
|
||||
for (int j = 1; j <= n; j++) {
|
||||
if (!visited[j] && grid[cur.first][j] != INT_MAX && (minDist[cur.first] + grid[cur.first][j] < minDist[j])) {
|
||||
minDist[j] = minDist[cur.first] + grid[cur.first][j];
|
||||
pq.push(pair<int, int>(j, minDist[j]));
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
if (minDist[end] == INT_MAX) cout << -1 << endl; // 不能到达终点
|
||||
else cout << minDist[end] << endl; // 到达终点最短路径
|
||||
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
* 时间复杂度:O(E * (N + logE)) E为边的数量,N为节点数量
|
||||
* 空间复杂度:O(log(N^2))
|
||||
|
||||
`while (!pq.empty())` 时间复杂度为 E ,while 里面 每次取元素 时间复杂度 为 logE,和 一个for循环 时间复杂度 为 N 。
|
||||
|
||||
所以整体是 E * (N + logE)
|
||||
|
||||
|
||||
## 总结
|
||||
|
||||
在学习一种优化思路的时候,首先就要知道为什么要优化,遇到了什么问题。
|
||||
|
||||
正如我在开篇就给大家交代清楚 堆优化方式的背景。
|
||||
|
||||
堆优化的整体思路和 朴素版是大体一样的,区别是 堆优化从边的角度触发,且利用堆来排序。
|
||||
|
||||
很多录友别说写堆优化 就是看 堆优化的代码也看的很懵。
|
||||
|
||||
主要是因为两点:
|
||||
|
||||
* 不熟悉邻接表的表达方式
|
||||
* 对dijkstra的实现思路还是不熟
|
||||
|
||||
这是我为什么 本篇花了大力气来讲解 图的存储,就是为了让大家彻底理解邻接表以及邻接表的代码写法。
|
||||
|
||||
至于 dijkstra的实现思路 ,朴素版 和 堆优化版本 都是 按照 dijkstra 三部曲来的。
|
||||
|
||||
理解了三部曲,dijkstra 的思路就是清晰的。
|
||||
|
||||
针对邻接表版本代码 我做了详细的 时间复杂度分析,也让录友们清楚,相对于 朴素版,时间都优化到哪了。
|
||||
|
||||
最后 我也给出了 邻接矩阵的版本代码,分析了这一版本的必要性以及时间复杂度。
|
||||
|
||||
至此通过 两篇dijkstra的文章,终于把 dijkstra 讲完了,如果大家对我讲解里所涉及的内容都吃透的话,详细对 dijkstra 算法也就理解到位了。
|
||||
|
||||
|
||||
|
||||
733
problems/kama47.参会dijkstra朴素.md
Normal file
733
problems/kama47.参会dijkstra朴素.md
Normal file
@ -0,0 +1,733 @@
|
||||
|
||||
# dijkstra(朴素版)精讲
|
||||
|
||||
[题目链接](https://kamacoder.com/problempage.php?pid=1047)
|
||||
|
||||
【题目描述】
|
||||
|
||||
小明是一位科学家,他需要参加一场重要的国际科学大会,以展示自己的最新研究成果。
|
||||
|
||||
小明的起点是第一个车站,终点是最后一个车站。然而,途中的各个车站之间的道路状况、交通拥堵程度以及可能的自然因素(如天气变化)等不同,这些因素都会影响每条路径的通行时间。
|
||||
|
||||
小明希望能选择一条花费时间最少的路线,以确保他能够尽快到达目的地。
|
||||
|
||||
【输入描述】
|
||||
|
||||
第一行包含两个正整数,第一个正整数 N 表示一共有 N 个公共汽车站,第二个正整数 M 表示有 M 条公路。
|
||||
|
||||
接下来为 M 行,每行包括三个整数,S、E 和 V,代表了从 S 车站可以单向直达 E 车站,并且需要花费 V 单位的时间。
|
||||
|
||||
【输出描述】
|
||||
|
||||
输出一个整数,代表小明在途中和其他科学家和科研团队交流所花费的最少时间。
|
||||
|
||||
输入示例
|
||||
|
||||
```
|
||||
7 9
|
||||
1 2 1
|
||||
1 3 4
|
||||
2 3 2
|
||||
2 4 5
|
||||
3 4 2
|
||||
4 5 3
|
||||
2 6 4
|
||||
5 7 4
|
||||
6 7 9
|
||||
```
|
||||
|
||||
输出示例:12
|
||||
|
||||
【提示信息】
|
||||
|
||||
能够到达的情况:
|
||||
|
||||
如下图所示,起始车站为 1 号车站,终点车站为 7 号车站,绿色路线为最短的路线,路线总长度为 12,则输出 12。
|
||||
|
||||

|
||||
|
||||
不能到达的情况:
|
||||
|
||||
如下图所示,当从起始车站不能到达终点车站时,则输出 -1。
|
||||
|
||||

|
||||
|
||||
数据范围:
|
||||
|
||||
1 <= N <= 500;
|
||||
1 <= M <= 5000;
|
||||
|
||||
## 思路
|
||||
|
||||
本题就是求最短路,最短路是图论中的经典问题即:给出一个有向图,一个起点,一个终点,问起点到终点的最短路径。
|
||||
|
||||
接下来,我们来详细讲解最短路算法中的 dijkstra 算法。
|
||||
|
||||
dijkstra算法:在有权图(权值非负数)中求从起点到其他节点的最短路径算法。
|
||||
|
||||
需要注意两点:
|
||||
|
||||
* dijkstra 算法可以同时求 起点到所有节点的最短路径
|
||||
* 权值不能为负数
|
||||
|
||||
(这两点后面我们会讲到)
|
||||
|
||||
如本题示例中的图:
|
||||
|
||||
|
||||
|
||||
起点(节点1)到终点(节点7) 的最短路径是 图中 标记绿线的部分。
|
||||
|
||||
最短路径的权值为12。
|
||||
|
||||
其实 dijkstra 算法 和 我们之前讲解的prim算法思路非常接近,如果大家认真学过[prim算法](https://mp.weixin.qq.com/s/yX936hHC6Z10K36Vm1Wl9w),那么理解 Dijkstra 算法会相对容易很多。(这也是我要先讲prim再讲dijkstra的原因)
|
||||
|
||||
dijkstra 算法 同样是贪心的思路,不断寻找距离 源点最近的没有访问过的节点。
|
||||
|
||||
这里我也给出 **dijkstra三部曲**:
|
||||
|
||||
1. 第一步,选源点到哪个节点近且该节点未被访问过
|
||||
2. 第二步,该最近节点被标记访问过
|
||||
3. 第三步,更新非访问节点到源点的距离(即更新minDist数组)
|
||||
|
||||
大家此时已经会发现,这和prim算法 怎么这么像呢。
|
||||
|
||||
我在[prim算法](https://mp.weixin.qq.com/s/yX936hHC6Z10K36Vm1Wl9w)讲解中也给出了三部曲。 prim 和 dijkstra 确实很像,思路也是类似的,这一点我在后面还会详细来讲。
|
||||
|
||||
在dijkstra算法中,同样有一个数组很重要,起名为:minDist。
|
||||
|
||||
**minDist数组 用来记录 每一个节点距离源点的最小距离**。
|
||||
|
||||
理解这一点很重要,也是理解 dijkstra 算法的核心所在。
|
||||
|
||||
大家现在看着可能有点懵,不知道什么意思。
|
||||
|
||||
没关系,先让大家有一个印象,对理解后面讲解有帮助。
|
||||
|
||||
我们先来画图看一下 dijkstra 的工作过程,以本题示例为例: (以下为朴素版dijkstra的思路)
|
||||
|
||||
(**示例中节点编号是从1开始,所以为了让大家看的不晕,minDist数组下标我也从 1 开始计数,下标0 就不使用了,这样 下标和节点标号就可以对应上了,避免大家搞混**)
|
||||
|
||||
## 朴素版dijkstra
|
||||
|
||||
### 模拟过程
|
||||
|
||||
-----------
|
||||
|
||||
0、初始化
|
||||
|
||||
minDist数组数值初始化为int最大值。
|
||||
|
||||
这里在强点一下 **minDist数组的含义:记录所有节点到源点的最短路径**,那么初始化的时候就应该初始为最大值,这样才能在后续出现最短路径的时候及时更新。
|
||||
|
||||

|
||||
|
||||
(图中,max 表示默认值,节点0 不做处理,统一从下标1 开始计算,这样下标和节点数值统一, 方便大家理解,避免搞混)
|
||||
|
||||
源点(节点1) 到自己的距离为0,所以 minDist[1] = 0
|
||||
|
||||
此时所有节点都没有被访问过,所以 visited数组都为0
|
||||
|
||||
---------------
|
||||
|
||||
以下为dijkstra 三部曲
|
||||
|
||||
1、选源点到哪个节点近且该节点未被访问过
|
||||
|
||||
源点距离源点最近,距离为0,且未被访问。
|
||||
|
||||
2、该最近节点被标记访问过
|
||||
|
||||
标记源点访问过
|
||||
|
||||
3、更新非访问节点到源点的距离(即更新minDist数组) ,如图:
|
||||
|
||||

|
||||
|
||||
|
||||
更新 minDist数组,即:源点(节点1) 到 节点2 和 节点3的距离。
|
||||
|
||||
* 源点到节点2的最短距离为1,小于原minDist[2]的数值max,更新minDist[2] = 1
|
||||
* 源点到节点3的最短距离为4,小于原minDist[3]的数值max,更新minDist[4] = 4
|
||||
|
||||
可能有录友问:为啥和 minDist[2] 比较?
|
||||
|
||||
再强调一下 minDist[2] 的含义,它表示源点到节点2的最短距离,那么目前我们得到了 源点到节点2的最短距离为1,小于默认值max,所以更新。 minDist[3]的更新同理
|
||||
|
||||
|
||||
-------------
|
||||
|
||||
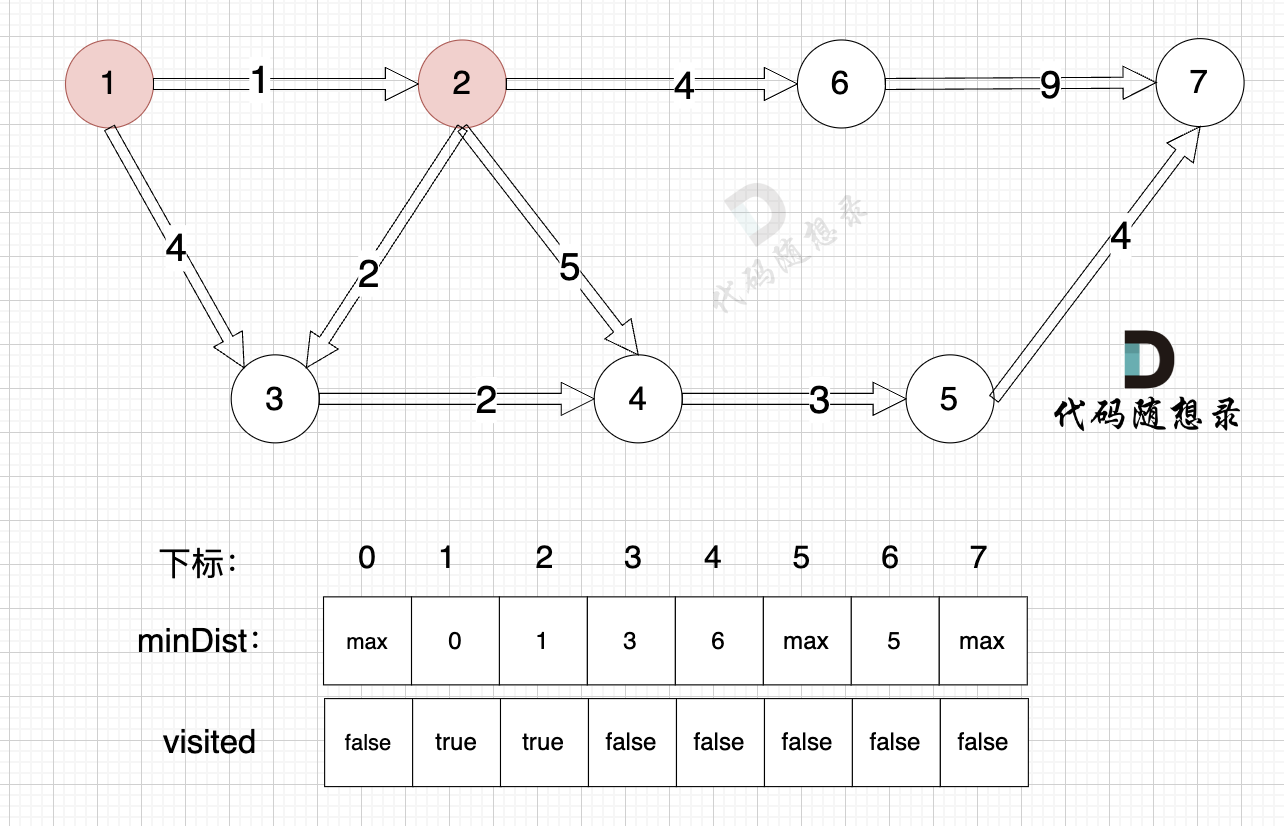
1、选源点到哪个节点近且该节点未被访问过
|
||||
|
||||
未访问过的节点中,源点到节点2距离最近,选节点2
|
||||
|
||||
2、该最近节点被标记访问过
|
||||
|
||||
节点2被标记访问过
|
||||
|
||||
3、更新非访问节点到源点的距离(即更新minDist数组) ,如图:
|
||||
|
||||
|
||||
|
||||
|
||||
更新 minDist数组,即:源点(节点1) 到 节点6 、 节点3 和 节点4的距离。
|
||||
|
||||
**为什么更新这些节点呢? 怎么不更新其他节点呢**?
|
||||
|
||||
因为 源点(节点1)通过 已经计算过的节点(节点2) 可以链接到的节点 有 节点3,节点4和节点6.
|
||||
|
||||
|
||||
更新 minDist数组:
|
||||
|
||||
* 源点到节点6的最短距离为5,小于原minDist[6]的数值max,更新minDist[6] = 5
|
||||
* 源点到节点3的最短距离为3,小于原minDist[3]的数值4,更新minDist[3] = 3
|
||||
* 源点到节点4的最短距离为6,小于原minDist[4]的数值max,更新minDist[4] = 6
|
||||
|
||||
|
||||
|
||||
-------------------
|
||||
|
||||
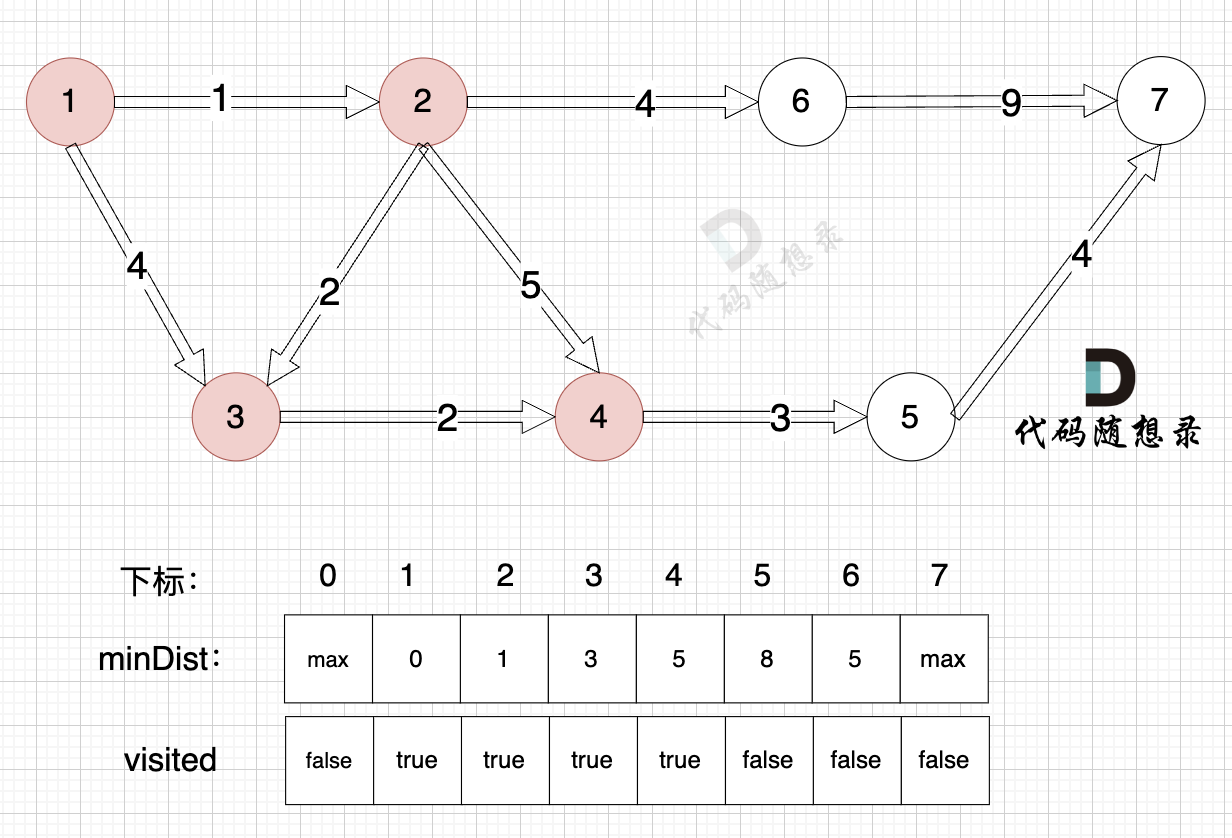
1、选源点到哪个节点近且该节点未被访问过
|
||||
|
||||
未访问过的节点中,源点距离哪些节点最近,怎么算的?
|
||||
|
||||
其实就是看 minDist数组里的数值,minDist 记录了 源点到所有节点的最近距离,结合visited数组筛选出未访问的节点就好。
|
||||
|
||||
从 上面的图,或者 从minDist数组中,我们都能看出 未访问过的节点中,源点(节点1)到节点3距离最近。
|
||||
|
||||
|
||||
2、该最近节点被标记访问过
|
||||
|
||||
节点3被标记访问过
|
||||
|
||||
3、更新非访问节点到源点的距离(即更新minDist数组) ,如图:
|
||||
|
||||

|
||||
|
||||
由于节点3的加入,那么源点可以有新的路径链接到节点4 所以更新minDist数组:
|
||||
|
||||
更新 minDist数组:
|
||||
|
||||
* 源点到节点4的最短距离为5,小于原minDist[4]的数值6,更新minDist[4] = 5
|
||||
|
||||
------------------
|
||||
|
||||
1、选源点到哪个节点近且该节点未被访问过
|
||||
|
||||
距离源点最近且没有被访问过的节点,有节点4 和 节点6,距离源点距离都是 5 (minDist[4] = 5,minDist[6] = 5) ,选哪个节点都可以。
|
||||
|
||||
2、该最近节点被标记访问过
|
||||
|
||||
节点4被标记访问过
|
||||
|
||||
3、更新非访问节点到源点的距离(即更新minDist数组) ,如图:
|
||||
|
||||
|
||||
|
||||
由于节点4的加入,那么源点可以链接到节点5 所以更新minDist数组:
|
||||
|
||||
* 源点到节点5的最短距离为8,小于原minDist[5]的数值max,更新minDist[5] = 8
|
||||
|
||||
--------------
|
||||
|
||||
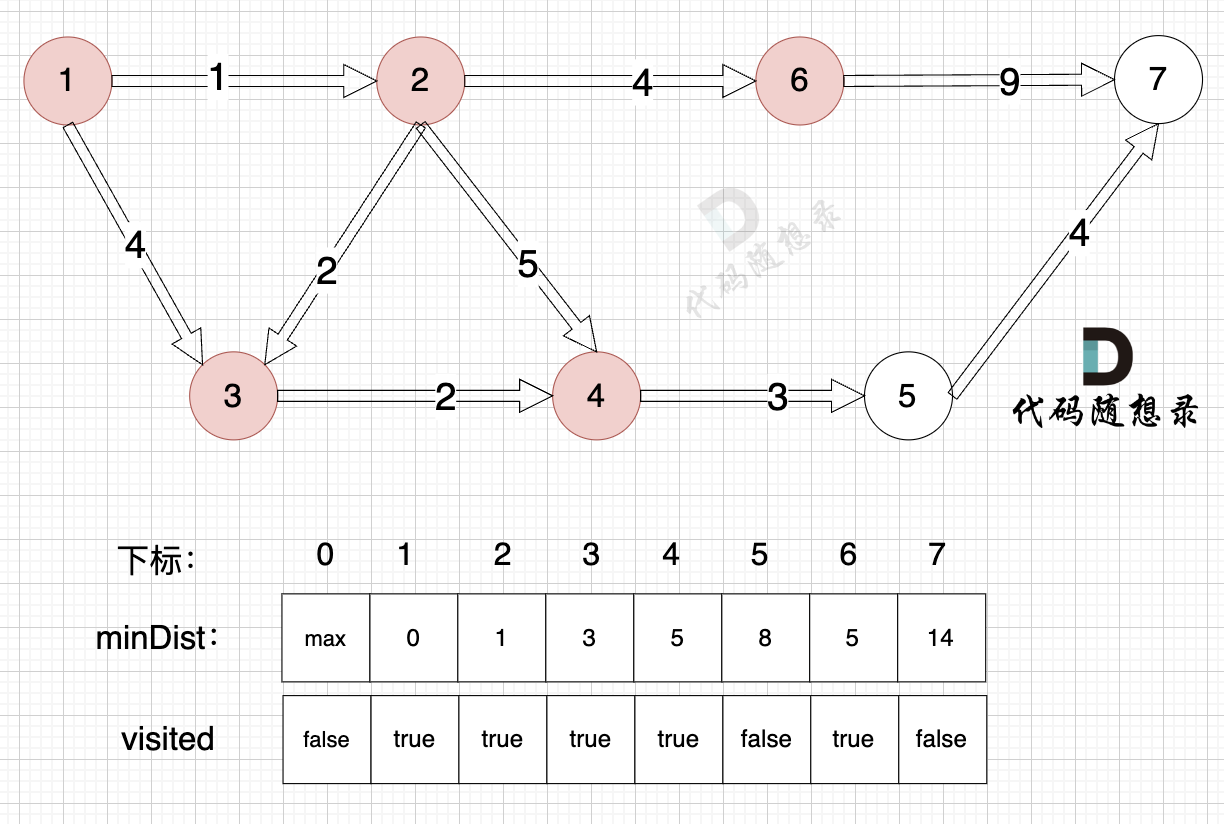
1、选源点到哪个节点近且该节点未被访问过
|
||||
|
||||
距离源点最近且没有被访问过的节点,是节点6,距离源点距离是 5 (minDist[6] = 5)
|
||||
|
||||
|
||||
2、该最近节点被标记访问过
|
||||
|
||||
节点6 被标记访问过
|
||||
|
||||
|
||||
3、更新非访问节点到源点的距离(即更新minDist数组) ,如图:
|
||||
|
||||
|
||||
|
||||
由于节点6的加入,那么源点可以链接到节点7 所以 更新minDist数组:
|
||||
|
||||
* 源点到节点7的最短距离为14,小于原minDist[7]的数值max,更新minDist[7] = 14
|
||||
|
||||
|
||||
|
||||
-------------------
|
||||
|
||||
1、选源点到哪个节点近且该节点未被访问过
|
||||
|
||||
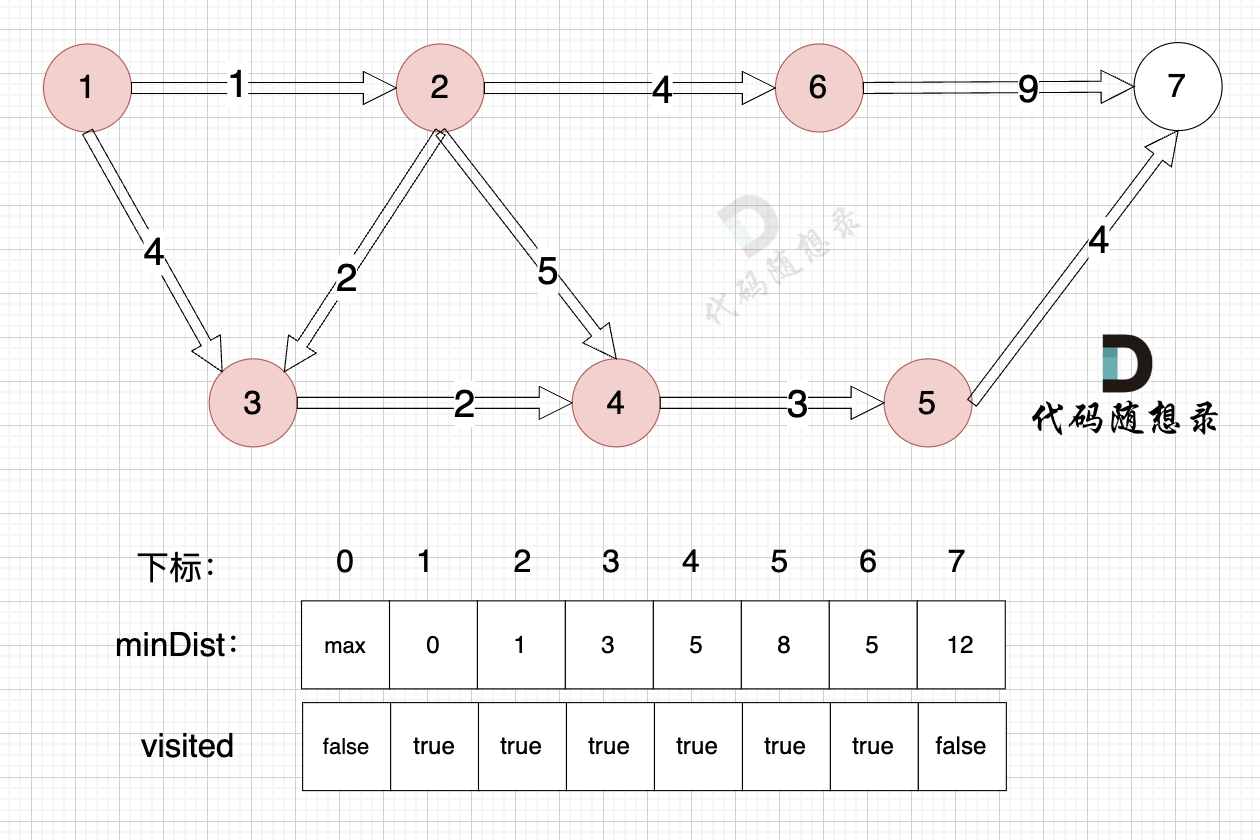
距离源点最近且没有被访问过的节点,是节点5,距离源点距离是 8 (minDist[5] = 8)
|
||||
|
||||
2、该最近节点被标记访问过
|
||||
|
||||
节点5 被标记访问过
|
||||
|
||||
3、更新非访问节点到源点的距离(即更新minDist数组) ,如图:
|
||||
|
||||
|
||||
|
||||
由于节点5的加入,那么源点有新的路径可以链接到节点7 所以 更新minDist数组:
|
||||
|
||||
* 源点到节点7的最短距离为12,小于原minDist[7]的数值14,更新minDist[7] = 12
|
||||
|
||||
-----------------
|
||||
|
||||
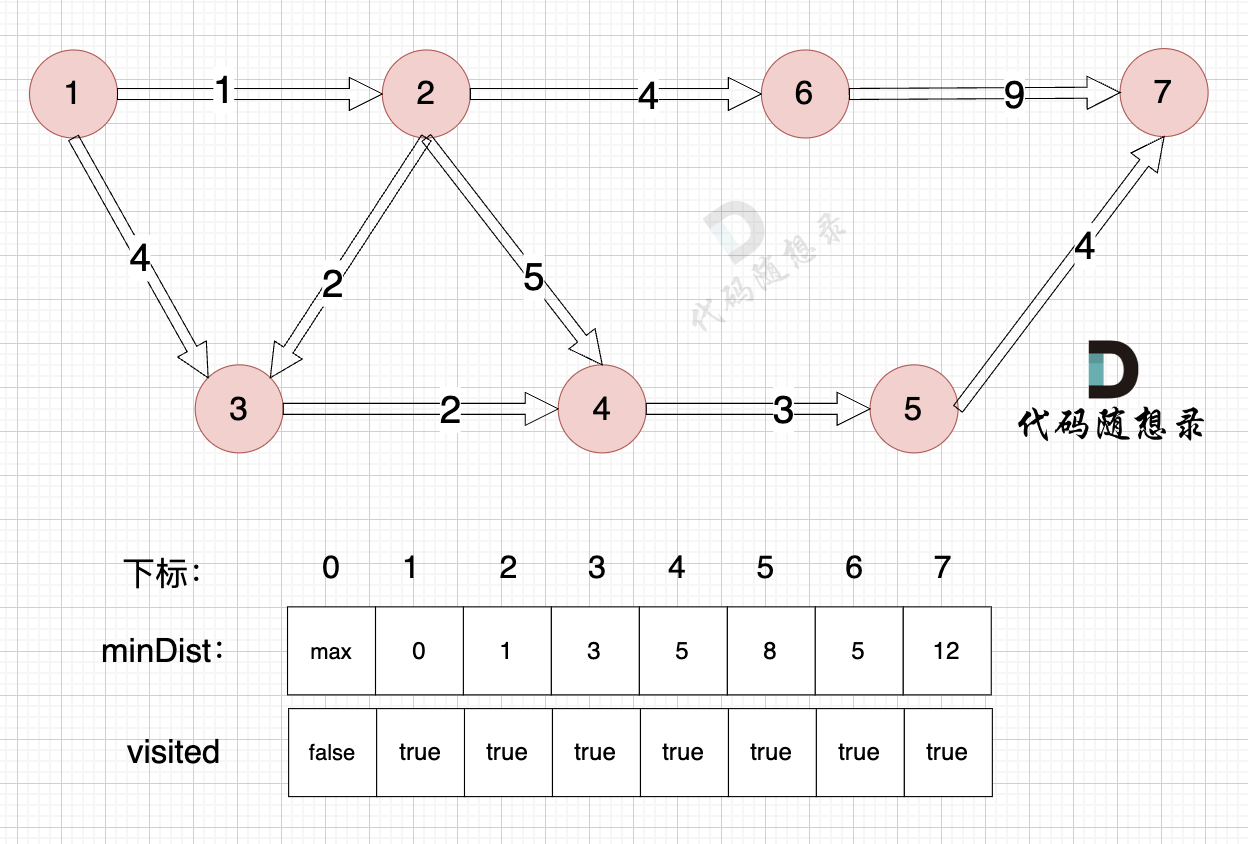
1、选源点到哪个节点近且该节点未被访问过
|
||||
|
||||
距离源点最近且没有被访问过的节点,是节点7(终点),距离源点距离是 12 (minDist[7] = 12)
|
||||
|
||||
2、该最近节点被标记访问过
|
||||
|
||||
节点7 被标记访问过
|
||||
|
||||
3、更新非访问节点到源点的距离(即更新minDist数组) ,如图:
|
||||
|
||||
|
||||
|
||||
节点7加入,但节点7到节点7的距离为0,所以 不用更新minDist数组
|
||||
|
||||
--------------------
|
||||
|
||||
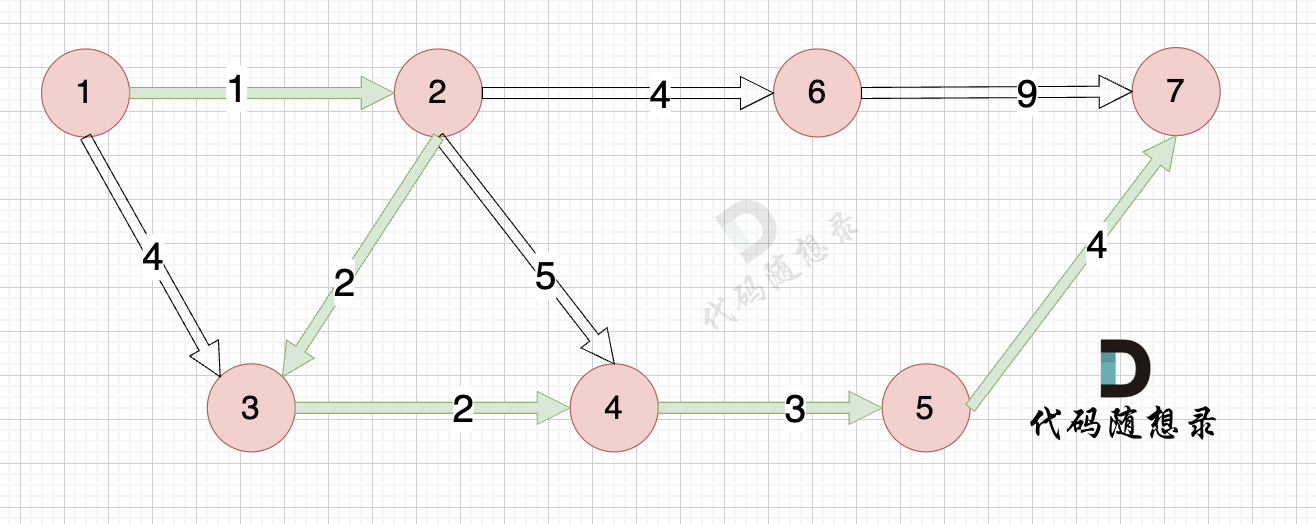
最后我们要求起点(节点1) 到终点 (节点7)的距离。
|
||||
|
||||
再来回顾一下minDist数组的含义:记录 每一个节点距离源点的最小距离。
|
||||
|
||||
那么起到(节点1)到终点(节点7)的最短距离就是 minDist[7] ,按上面举例讲解来说,minDist[7] = 12,节点1 到节点7的最短路径为 12。
|
||||
|
||||
路径如图:
|
||||
|
||||
|
||||
|
||||
在上面的讲解中,每一步 我都是按照 dijkstra 三部曲来讲解的,理解了这三部曲,代码也就好懂的。
|
||||
|
||||
### 代码实现
|
||||
|
||||
本题代码如下,里面的 三部曲 我都做了注释,大家按照我上面的讲解 来看如下代码:
|
||||
|
||||
```CPP
|
||||
#include <iostream>
|
||||
#include <vector>
|
||||
#include <climits>
|
||||
using namespace std;
|
||||
int main() {
|
||||
int n, m, p1, p2, val;
|
||||
cin >> n >> m;
|
||||
|
||||
vector<vector<int>> grid(n + 1, vector<int>(n + 1, INT_MAX));
|
||||
for(int i = 0; i < m; i++){
|
||||
cin >> p1 >> p2 >> val;
|
||||
grid[p1][p2] = val;
|
||||
}
|
||||
|
||||
int start = 1;
|
||||
int end = n;
|
||||
|
||||
// 存储从源点到每个节点的最短距离
|
||||
std::vector<int> minDist(n + 1, INT_MAX);
|
||||
|
||||
// 记录顶点是否被访问过
|
||||
std::vector<bool> visited(n + 1, false);
|
||||
|
||||
minDist[start] = 0; // 起始点到自身的距离为0
|
||||
|
||||
for (int i = 1; i <= n; i++) { // 遍历所有节点
|
||||
|
||||
int minVal = INT_MAX;
|
||||
int cur = 1;
|
||||
|
||||
// 1、选距离源点最近且未访问过的节点
|
||||
for (int v = 1; v <= n; ++v) {
|
||||
if (!visited[v] && minDist[v] < minVal) {
|
||||
minVal = minDist[v];
|
||||
cur = v;
|
||||
}
|
||||
}
|
||||
|
||||
visited[cur] = true; // 2、标记该节点已被访问
|
||||
|
||||
// 3、第三步,更新非访问节点到源点的距离(即更新minDist数组)
|
||||
for (int v = 1; v <= n; v++) {
|
||||
if (!visited[v] && grid[cur][v] != INT_MAX && minDist[cur] + grid[cur][v] < minDist[v]) {
|
||||
minDist[v] = minDist[cur] + grid[cur][v];
|
||||
}
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
if (minDist[end] == INT_MAX) cout << -1 << endl; // 不能到达终点
|
||||
else cout << minDist[end] << endl; // 到达终点最短路径
|
||||
|
||||
}
|
||||
```
|
||||
|
||||
* 时间复杂度:O(n^2)
|
||||
* 空间复杂度:O(n^2)
|
||||
|
||||
### debug方法
|
||||
|
||||
写这种题目难免会有各种各样的问题,我们如何发现自己的代码是否有问题呢?
|
||||
|
||||
最好的方式就是打日志,本题的话,就是将 minDist 数组打印出来,就可以很明显发现 哪里出问题了。
|
||||
|
||||
每次选择节点后,minDist数组的变化是否符合预期 ,是否和我上面讲的逻辑是对应的。
|
||||
|
||||
例如本题,如果想debug的话,打印日志可以这样写:
|
||||
|
||||
|
||||
```CPP
|
||||
#include <iostream>
|
||||
#include <vector>
|
||||
#include <climits>
|
||||
using namespace std;
|
||||
int main() {
|
||||
int n, m, p1, p2, val;
|
||||
cin >> n >> m;
|
||||
|
||||
vector<vector<int>> grid(n + 1, vector<int>(n + 1, INT_MAX));
|
||||
for(int i = 0; i < m; i++){
|
||||
cin >> p1 >> p2 >> val;
|
||||
grid[p1][p2] = val;
|
||||
}
|
||||
|
||||
int start = 1;
|
||||
int end = n;
|
||||
|
||||
std::vector<int> minDist(n + 1, INT_MAX);
|
||||
|
||||
std::vector<bool> visited(n + 1, false);
|
||||
|
||||
minDist[start] = 0;
|
||||
for (int i = 1; i <= n; i++) {
|
||||
|
||||
int minVal = INT_MAX;
|
||||
int cur = 1;
|
||||
|
||||
|
||||
for (int v = 1; v <= n; ++v) {
|
||||
if (!visited[v] && minDist[v] < minVal) {
|
||||
minVal = minDist[v];
|
||||
cur = v;
|
||||
}
|
||||
}
|
||||
|
||||
visited[cur] = true;
|
||||
|
||||
for (int v = 1; v <= n; v++) {
|
||||
if (!visited[v] && grid[cur][v] != INT_MAX && minDist[cur] + grid[cur][v] < minDist[v]) {
|
||||
minDist[v] = minDist[cur] + grid[cur][v];
|
||||
}
|
||||
}
|
||||
|
||||
// 打印日志:
|
||||
cout << "select:" << cur << endl;
|
||||
for (int v = 1; v <= n; v++) cout << v << ":" << minDist[v] << " ";
|
||||
cout << endl << endl;;
|
||||
|
||||
}
|
||||
if (minDist[end] == INT_MAX) cout << -1 << endl;
|
||||
else cout << minDist[end] << endl;
|
||||
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
打印后的结果:
|
||||
|
||||
```
|
||||
select:1
|
||||
1:0 2:1 3:4 4:2147483647 5:2147483647 6:2147483647 7:2147483647
|
||||
|
||||
select:2
|
||||
1:0 2:1 3:3 4:6 5:2147483647 6:5 7:2147483647
|
||||
|
||||
select:3
|
||||
1:0 2:1 3:3 4:5 5:2147483647 6:5 7:2147483647
|
||||
|
||||
select:4
|
||||
1:0 2:1 3:3 4:5 5:8 6:5 7:2147483647
|
||||
|
||||
select:6
|
||||
1:0 2:1 3:3 4:5 5:8 6:5 7:14
|
||||
|
||||
select:5
|
||||
1:0 2:1 3:3 4:5 5:8 6:5 7:12
|
||||
|
||||
select:7
|
||||
1:0 2:1 3:3 4:5 5:8 6:5 7:12
|
||||
```
|
||||
|
||||
打印日志可以和上面我讲解的过程进行对比,每一步的结果是完全对应的。
|
||||
|
||||
所以如果大家如果代码有问题,打日志来debug是最好的方法
|
||||
|
||||
### 如何求路径
|
||||
|
||||
如果题目要求把最短路的路径打印出来,应该怎么办呢?
|
||||
|
||||
这里还是有一些“坑”的,本题打印路径和 prim 打印路径是一样的,我在 [prim算法精讲](https://mp.weixin.qq.com/s/yX936hHC6Z10K36Vm1Wl9w) 【拓展】中 已经详细讲解了。
|
||||
|
||||
在这里就不再赘述。
|
||||
|
||||
打印路径只需要添加 几行代码, 打印路径的代码我都加上的日志,如下:
|
||||
|
||||
```CPP
|
||||
#include <iostream>
|
||||
#include <vector>
|
||||
#include <climits>
|
||||
using namespace std;
|
||||
int main() {
|
||||
int n, m, p1, p2, val;
|
||||
cin >> n >> m;
|
||||
|
||||
vector<vector<int>> grid(n + 1, vector<int>(n + 1, INT_MAX));
|
||||
for(int i = 0; i < m; i++){
|
||||
cin >> p1 >> p2 >> val;
|
||||
grid[p1][p2] = val;
|
||||
}
|
||||
|
||||
int start = 1;
|
||||
int end = n;
|
||||
|
||||
std::vector<int> minDist(n + 1, INT_MAX);
|
||||
|
||||
std::vector<bool> visited(n + 1, false);
|
||||
|
||||
minDist[start] = 0;
|
||||
|
||||
//加上初始化
|
||||
vector<int> parent(n + 1, -1);
|
||||
|
||||
for (int i = 1; i <= n; i++) {
|
||||
|
||||
int minVal = INT_MAX;
|
||||
int cur = 1;
|
||||
|
||||
for (int v = 1; v <= n; ++v) {
|
||||
if (!visited[v] && minDist[v] < minVal) {
|
||||
minVal = minDist[v];
|
||||
cur = v;
|
||||
}
|
||||
}
|
||||
|
||||
visited[cur] = true;
|
||||
|
||||
for (int v = 1; v <= n; v++) {
|
||||
if (!visited[v] && grid[cur][v] != INT_MAX && minDist[cur] + grid[cur][v] < minDist[v]) {
|
||||
minDist[v] = minDist[cur] + grid[cur][v];
|
||||
parent[v] = cur; // 记录边
|
||||
}
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
// 输出最短情况
|
||||
for (int i = 1; i <= n; i++) {
|
||||
cout << parent[i] << "->" << i << endl;
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
打印结果:
|
||||
|
||||
```
|
||||
-1->1
|
||||
1->2
|
||||
2->3
|
||||
3->4
|
||||
4->5
|
||||
2->6
|
||||
5->7
|
||||
```
|
||||
|
||||
对应如图:
|
||||
|
||||

|
||||
|
||||
### 出现负数
|
||||
|
||||
如果图中边的权值为负数,dijkstra 还合适吗?
|
||||
|
||||
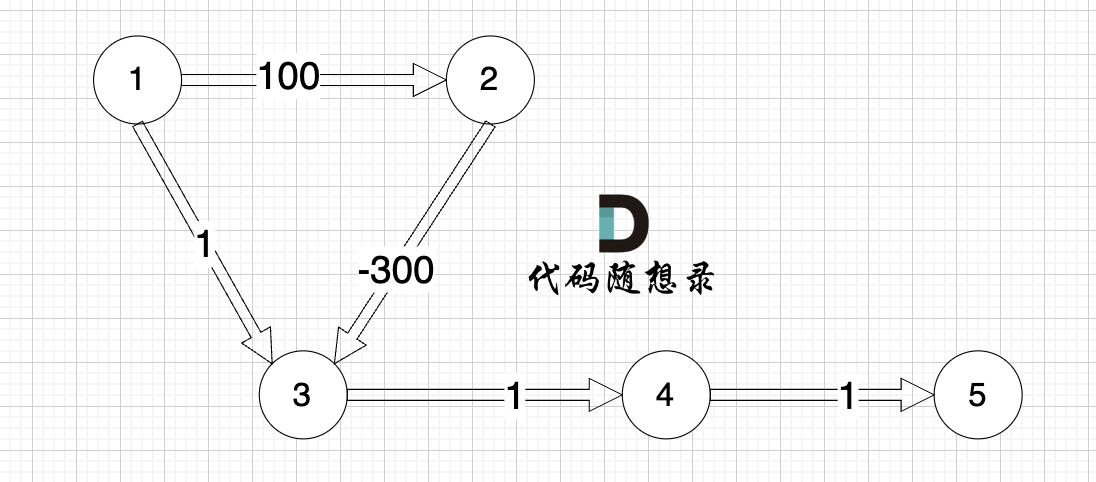
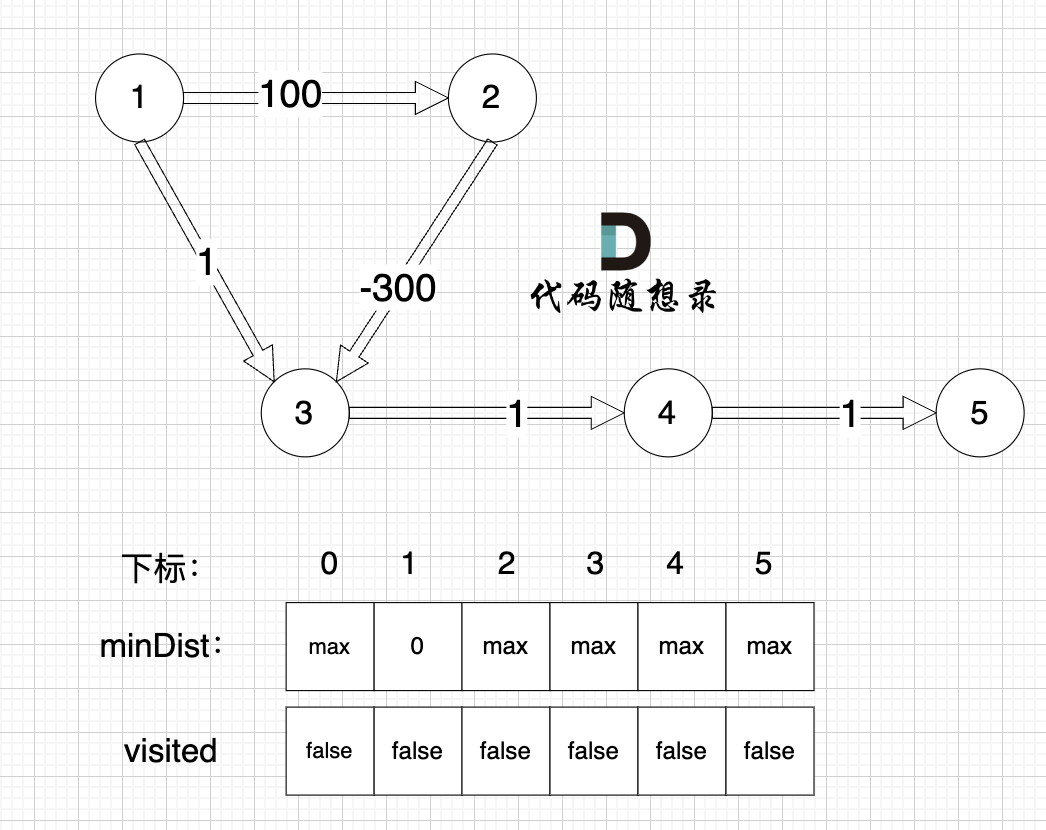
看一下这个图: (有负权值)
|
||||
|
||||
|
||||
|
||||
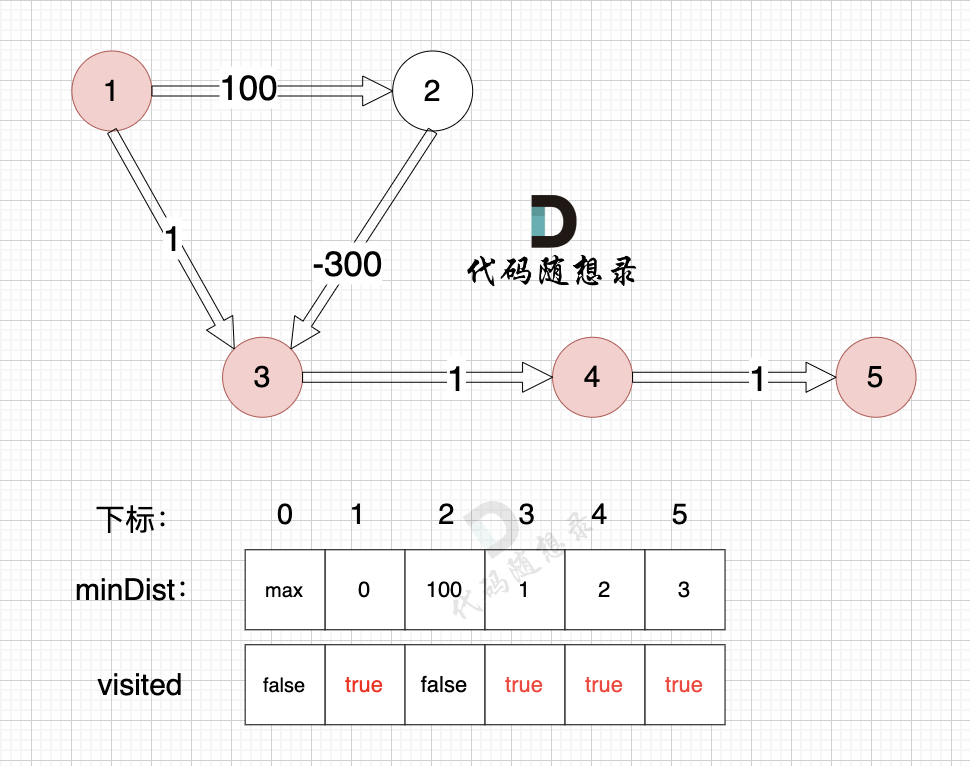
节点1 到 节点5 的最短路径 应该是 节点1 -> 节点2 -> 节点3 -> 节点4 -> 节点5
|
||||
|
||||
那我们来看dijkstra 求解的路径是什么样的,继续dijkstra 三部曲来模拟 :(dijkstra模拟过程上面已经详细讲过,以下只模拟重要过程,例如如何初始化就省略讲解了)
|
||||
|
||||
-----------
|
||||
|
||||
初始化:
|
||||
|
||||
|
||||
|
||||
---------------
|
||||
|
||||
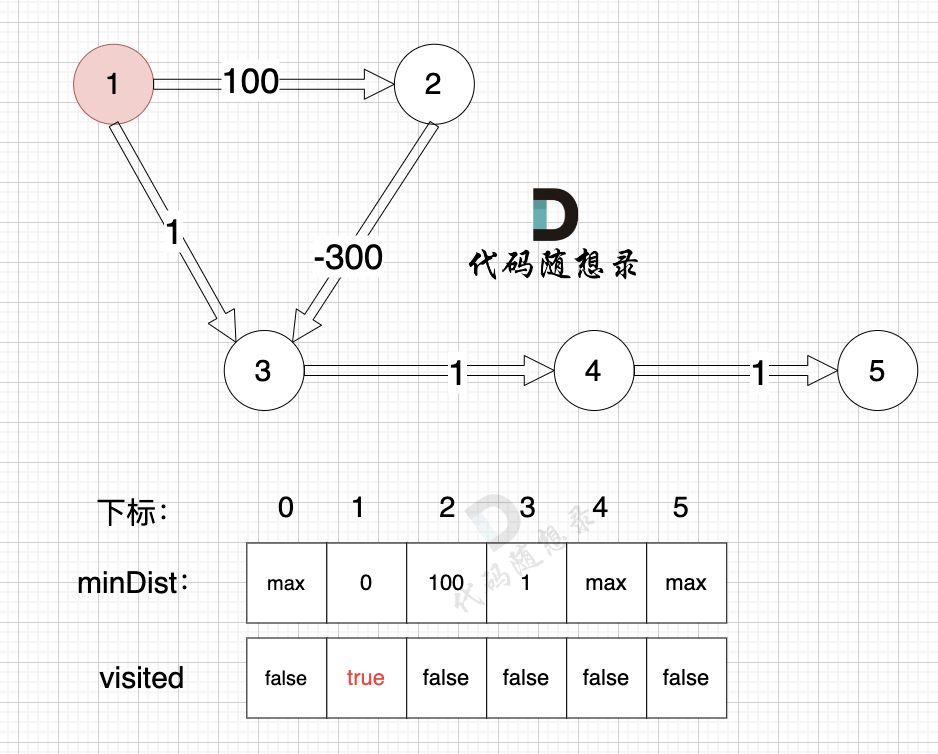
1、选源点到哪个节点近且该节点未被访问过
|
||||
|
||||
源点距离源点最近,距离为0,且未被访问。
|
||||
|
||||
2、该最近节点被标记访问过
|
||||
|
||||
标记源点访问过
|
||||
|
||||
3、更新非访问节点到源点的距离(即更新minDist数组) ,如图:
|
||||
|
||||
|
||||
|
||||
更新 minDist数组,即:源点(节点1) 到 节点2 和 节点3的距离。
|
||||
|
||||
* 源点到节点2的最短距离为100,小于原minDist[2]的数值max,更新minDist[2] = 100
|
||||
* 源点到节点3的最短距离为1,小于原minDist[3]的数值max,更新minDist[4] = 1
|
||||
|
||||
-------------------
|
||||
|
||||
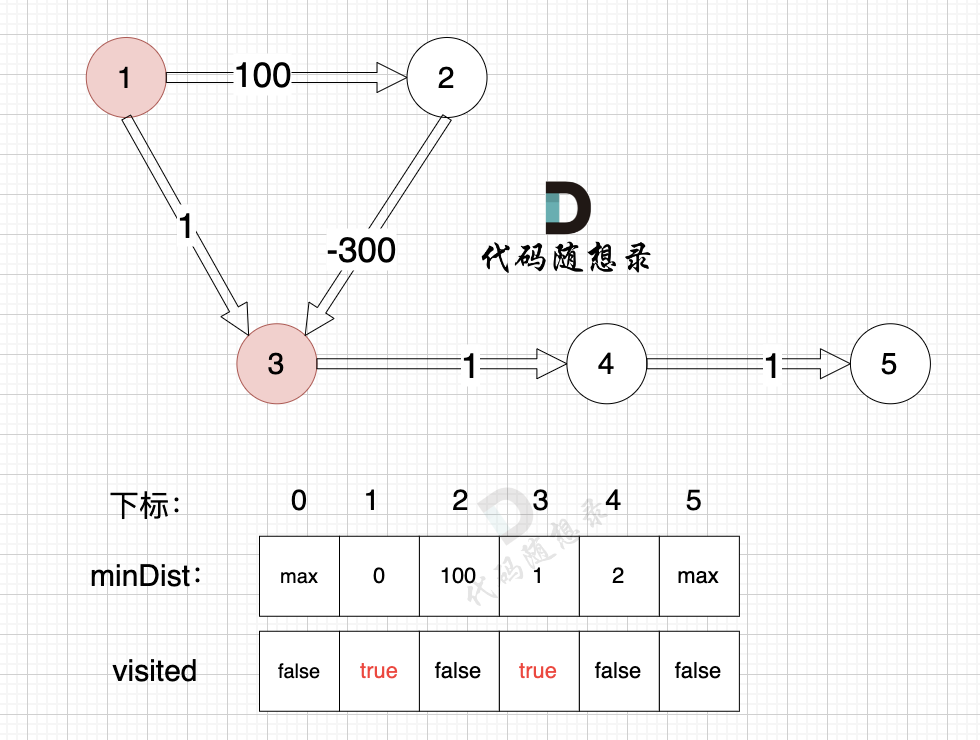
1、选源点到哪个节点近且该节点未被访问过
|
||||
|
||||
源点距离节点3最近,距离为1,且未被访问。
|
||||
|
||||
2、该最近节点被标记访问过
|
||||
|
||||
标记节点3访问过
|
||||
|
||||
3、更新非访问节点到源点的距离(即更新minDist数组) ,如图:
|
||||
|
||||
|
||||
|
||||
由于节点3的加入,那么源点可以有新的路径链接到节点4 所以更新minDist数组:
|
||||
|
||||
* 源点到节点4的最短距离为2,小于原minDist[4]的数值max,更新minDist[4] = 2
|
||||
|
||||
--------------
|
||||
|
||||
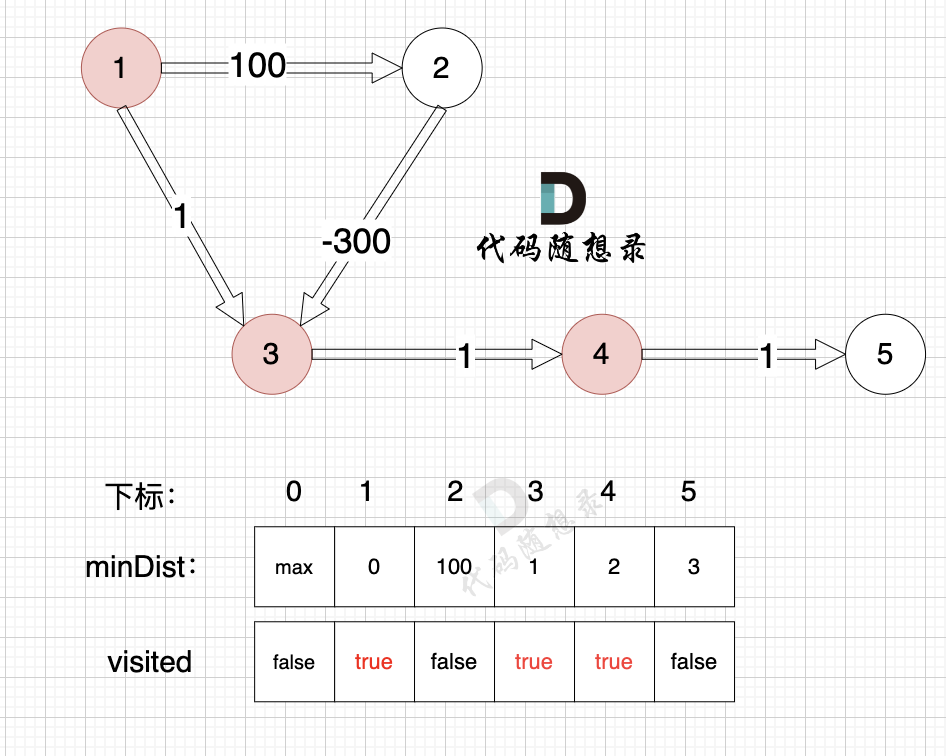
1、选源点到哪个节点近且该节点未被访问过
|
||||
|
||||
源点距离节点4最近,距离为2,且未被访问。
|
||||
|
||||
2、该最近节点被标记访问过
|
||||
|
||||
标记节点4访问过
|
||||
|
||||
3、更新非访问节点到源点的距离(即更新minDist数组) ,如图:
|
||||
|
||||
|
||||
|
||||
由于节点4的加入,那么源点可以有新的路径链接到节点5 所以更新minDist数组:
|
||||
|
||||
* 源点到节点5的最短距离为3,小于原minDist[5]的数值max,更新minDist[5] = 5
|
||||
|
||||
------------
|
||||
|
||||
1、选源点到哪个节点近且该节点未被访问过
|
||||
|
||||
源点距离节点5最近,距离为3,且未被访问。
|
||||
|
||||
2、该最近节点被标记访问过
|
||||
|
||||
标记节点5访问过
|
||||
|
||||
3、更新非访问节点到源点的距离(即更新minDist数组) ,如图:
|
||||
|
||||
|
||||
|
||||
节点5的加入,而节点5 没有链接其他节点, 所以不用更新minDist数组,仅标记节点5被访问过了
|
||||
|
||||
------------
|
||||
|
||||
1、选源点到哪个节点近且该节点未被访问过
|
||||
|
||||
源点距离节点2最近,距离为100,且未被访问。
|
||||
|
||||
2、该最近节点被标记访问过
|
||||
|
||||
标记节点2访问过
|
||||
|
||||
3、更新非访问节点到源点的距离(即更新minDist数组) ,如图:
|
||||
|
||||
|
||||
|
||||
--------------
|
||||
|
||||
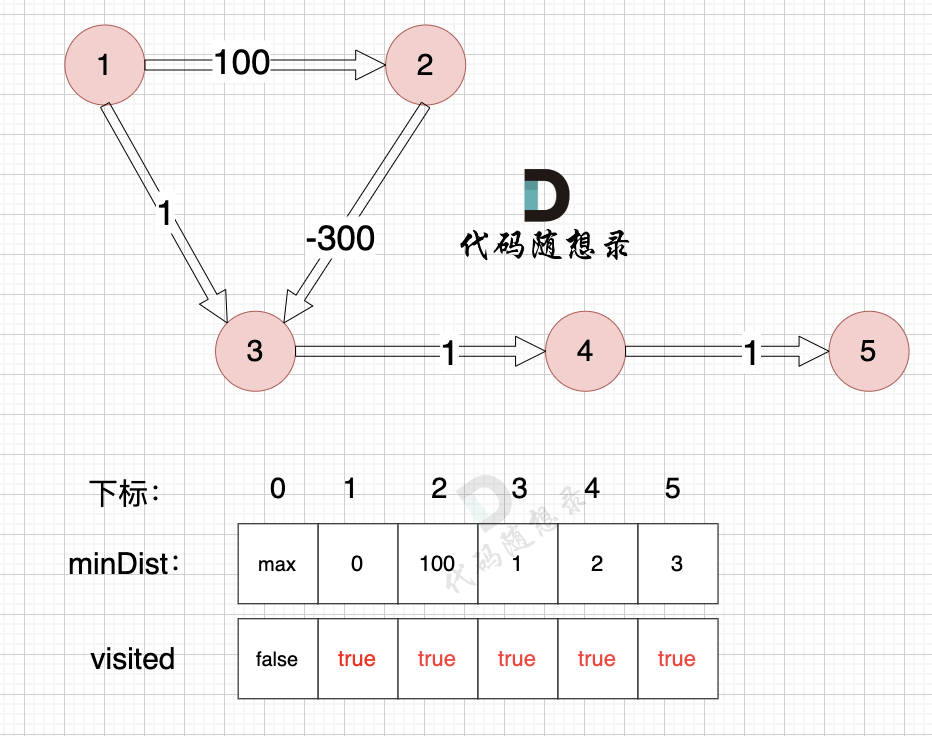
至此dijkstra的模拟过程就结束了,根据最后的minDist数组,我们求 节点1 到 节点5 的最短路径的权值总和为 3,路径: 节点1 -> 节点3 -> 节点4 -> 节点5
|
||||
|
||||
通过以上的过程模拟,我们可以发现 之所以 没有走有负权值的最短路径 是因为 在 访问 节点 2 的时候,节点 3 已经访问过了,就不会再更新了。
|
||||
|
||||
那有录友可能会想: 我可以改代码逻辑啊,访问过的节点,也让它继续访问不就好了?
|
||||
|
||||
那么访问过的节点还能继续访问会不会有死循环的出现呢?控制逻辑不让其死循环?那特殊情况自己能都想清楚吗?(可以试试,实践出真知)
|
||||
|
||||
对于负权值的出现,大家可以针对某一个场景 不断去修改 dijkstra 的代码,**但最终会发现只是 拆了东墙补西墙**,对dijkstra的补充逻辑只能满足某特定场景最短路求解。
|
||||
|
||||
对于求解带有负权值的最短路问题,可以使用 Bellman-Ford 算法 ,我在后序会详细讲解。
|
||||
|
||||
## dijkstra与prim算法的区别
|
||||
|
||||
> 这里再次提示,需要先看我的 [prim算法精讲](https://mp.weixin.qq.com/s/yX936hHC6Z10K36Vm1Wl9w) ,否则可能不知道我下面讲的是什么。
|
||||
|
||||
大家可以发现 dijkstra的代码看上去 怎么和 prim算法这么像呢。
|
||||
|
||||
其实代码大体不差,唯一区别在 三部曲中的 第三步: 更新minDist数组
|
||||
|
||||
因为**prim是求 非访问节点到最小生成树的最小距离,而 dijkstra是求 非访问节点到源点的最小距离**。
|
||||
|
||||
prim 更新 minDist数组的写法:
|
||||
|
||||
|
||||
```CPP
|
||||
for (int j = 1; j <= v; j++) {
|
||||
if (!isInTree[j] && grid[cur][j] < minDist[j]) {
|
||||
minDist[j] = grid[cur][j];
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
因为 minDist表示 节点到最小生成树的最小距离,所以 新节点cur的加入,只需要 使用 grid[cur][j] ,grid[cur][j] 就表示 cur 加入生成树后,生成树到 节点j 的距离。
|
||||
|
||||
dijkstra 更新 minDist数组的写法:
|
||||
|
||||
```CPP
|
||||
for (int v = 1; v <= n; v++) {
|
||||
if (!visited[v] && grid[cur][v] != INT_MAX && minDist[cur] + grid[cur][v] < minDist[v]) {
|
||||
minDist[v] = minDist[cur] + grid[cur][v];
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
因为 minDist表示 节点到源点的最小距离,所以 新节点 cur 的加入,需要使用 源点到cur的距离 (minDist[cur]) + cur 到 节点 v 的距离 (grid[cur][v]),才是 源点到节点v的距离。
|
||||
|
||||
此时大家可能不禁要想 prim算法 可以有负权值吗?
|
||||
|
||||
当然可以!
|
||||
|
||||
录友们可以自己思考思考一下,这是为什么?
|
||||
|
||||
这里我提示一下:prim算法只需要将节点以最小权值和链接在一起,不涉及到单一路径。
|
||||
|
||||
|
||||
|
||||
## 总结
|
||||
|
||||
本篇,我们深入讲解的dijkstra算法,详细模拟其工作的流程。
|
||||
|
||||
这里我给出了 **dijkstra 三部曲 来 帮助大家理解 该算法**,不至于 每次写 dijkstra 都是黑盒操作,没有框架没有章法。
|
||||
|
||||
在给出的代码中,我也按照三部曲的逻辑来给大家注释,只要理解这三部曲,即使 过段时间 对 dijkstra 算法有些遗忘,依然可以写出一个框架出来,然后再去调试细节。
|
||||
|
||||
对于图论算法,一般代码都比较长,很难写出代码直接可以提交通过,都需要一个debug的过程,所以 **学习如何debug 非常重要**!
|
||||
|
||||
这也是我为什么 在本文中 单独用来讲解 debug方法。
|
||||
|
||||
本题求的是最短路径和是多少,**同时我们也要掌握 如何把最短路径打印出来**。
|
||||
|
||||
我还写了大篇幅来讲解 负权值的情况, 只有画图带大家一步一步去 看 出现负权值 dijkstra的求解过程,才能帮助大家理解,问题出在哪里。
|
||||
|
||||
如果我直接讲:是**因为访问过的节点 不能再访问,导致错过真正的最短路**,我相信大家都不知道我在说啥。
|
||||
|
||||
最后我还讲解了 dijkstra 和 prim 算法的 相同 与 不同之处, 我在图论的讲解安排中 先讲 prim算法 再讲 dijkstra 是有目的的, **理解这两个算法的相同与不同之处 有助于大家学习的更深入**。
|
||||
|
||||
而不是 学了 dijkstra 就只看 dijkstra, 算法之间 都是有联系的,多去思考 算法之间的相互联系,会帮助大家思考的更深入,掌握的更彻底。
|
||||
|
||||
本篇写了这么长,我也只讲解了 朴素版dijkstra,**关于 堆优化dijkstra,我会在下一篇再来给大家详细讲解**。
|
||||
|
||||
加油
|
||||
|
||||
|
||||
|
||||
400
problems/kama53.寻宝-Kruskal.md
Normal file
400
problems/kama53.寻宝-Kruskal.md
Normal file
@ -0,0 +1,400 @@
|
||||
|
||||
# 寻宝
|
||||
|
||||
[卡码网:53. 寻宝](https://kamacoder.com/problempage.php?pid=1053)
|
||||
|
||||
题目描述:
|
||||
|
||||
在世界的某个区域,有一些分散的神秘岛屿,每个岛屿上都有一种珍稀的资源或者宝藏。国王打算在这些岛屿上建公路,方便运输。
|
||||
|
||||
不同岛屿之间,路途距离不同,国王希望你可以规划建公路的方案,如何可以以最短的总公路距离将 所有岛屿联通起来。
|
||||
|
||||
给定一张地图,其中包括了所有的岛屿,以及它们之间的距离。以最小化公路建设长度,确保可以链接到所有岛屿。
|
||||
|
||||
输入描述:
|
||||
|
||||
第一行包含两个整数V 和 E,V代表顶点数,E代表边数 。顶点编号是从1到V。例如:V=2,一个有两个顶点,分别是1和2。
|
||||
|
||||
接下来共有 E 行,每行三个整数 v1,v2 和 val,v1 和 v2 为边的起点和终点,val代表边的权值。
|
||||
|
||||
输出描述:
|
||||
|
||||
输出联通所有岛屿的最小路径总距离
|
||||
|
||||
输入示例:
|
||||
|
||||
```
|
||||
7 11
|
||||
1 2 1
|
||||
1 3 1
|
||||
1 5 2
|
||||
2 6 1
|
||||
2 4 2
|
||||
2 3 2
|
||||
3 4 1
|
||||
4 5 1
|
||||
5 6 2
|
||||
5 7 1
|
||||
6 7 1
|
||||
```
|
||||
|
||||
输出示例:
|
||||
|
||||
6
|
||||
|
||||
## 解题思路
|
||||
|
||||
在上一篇 我们讲解了 prim算法求解 最小生成树,本篇我们来讲解另一个算法:Kruskal,同样可以求最小生成树。
|
||||
|
||||
**prim 算法是维护节点的集合,而 Kruskal 是维护边的集合**。
|
||||
|
||||
上来就这么说,大家应该看不太懂,这里是先让大家有这么个印象,带着这个印象在看下文,理解的会更到位一些。
|
||||
|
||||
kruscal的思路:
|
||||
|
||||
* 边的权值排序,因为要优先选最小的边加入到生成树里
|
||||
* 遍历排序后的边
|
||||
* 如果边首尾的两个节点在同一个集合,说明如果连上这条边图中会出现环
|
||||
* 如果边首尾的两个节点不在同一个集合,加入到最小生成树,并把两个节点加入同一个集合
|
||||
|
||||
下面我们画图举例说明kruscal的工作过程。
|
||||
|
||||
依然以示例中,如下这个图来举例。
|
||||
|
||||
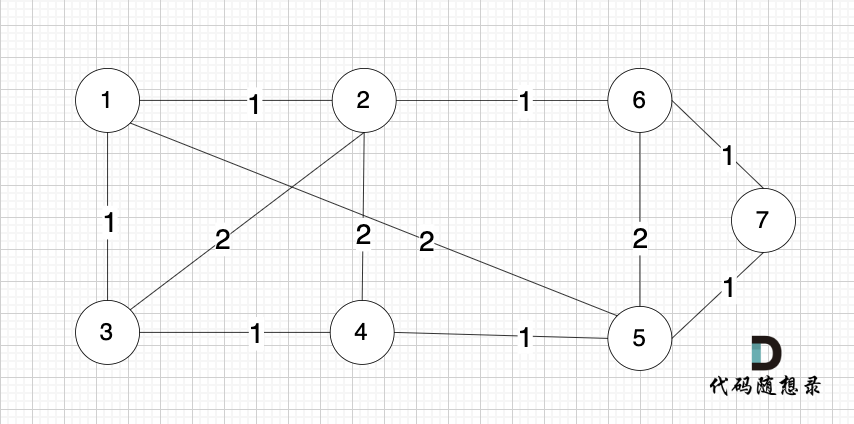
|
||||
|
||||
将图中的边按照权值有小到大排序,这样从贪心的角度来说,优先选 权值小的边加入到 最小生成树中。
|
||||
|
||||
排序后的边顺序为[(1,2) (4,5) (1,3) (2,6) (3,4) (6,7) (5,7) (1,5) (3,2) (2,4) (5,6)]
|
||||
|
||||
> (1,2) 表示节点1 与 节点2 之间的边。权值相同的边,先后顺序无所谓。
|
||||
|
||||
**开始从头遍历排序后的边**。
|
||||
|
||||
--------
|
||||
|
||||
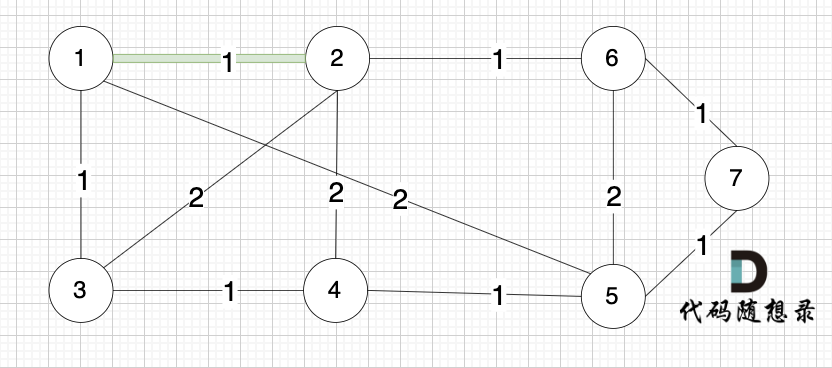
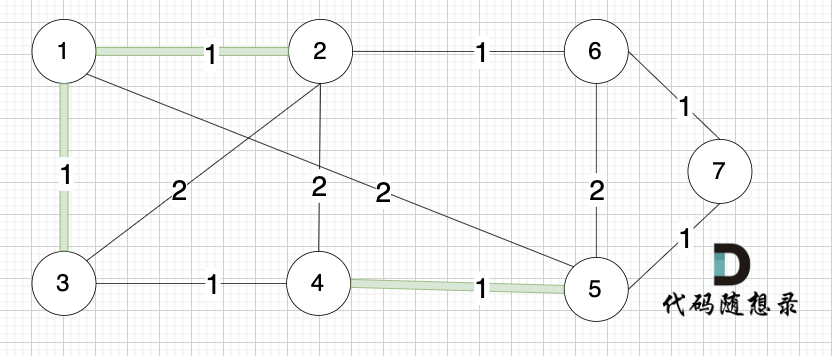
选边(1,2),节点1 和 节点2 不在同一个集合,所以生成树可以添加边(1,2),并将 节点1,节点2 放在同一个集合。
|
||||
|
||||
|
||||
|
||||
--------
|
||||
|
||||
选边(4,5),节点4 和 节点 5 不在同一个集合,生成树可以添加边(4,5) ,并将节点4,节点5 放到同一个集合。
|
||||
|
||||
|
||||
|
||||
**大家判断两个节点是否在同一个集合,就看图中两个节点是否有绿色的粗线连着就行**
|
||||
|
||||
------
|
||||
|
||||
(这里在强调一下,以下选边是按照上面排序好的边的数组来选择的)
|
||||
|
||||
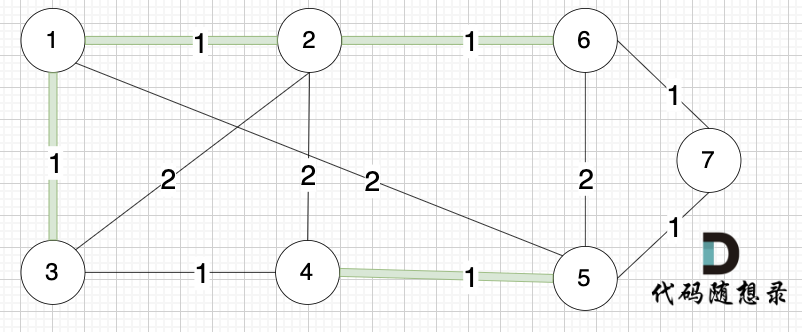
选边(1,3),节点1 和 节点3 不在同一个集合,生成树添加边(1,3),并将节点1,节点3 放到同一个集合。
|
||||
|
||||
|
||||
|
||||
---------
|
||||
|
||||
选边(2,6),节点2 和 节点6 不在同一个集合,生成树添加边(2,6),并将节点2,节点6 放到同一个集合。
|
||||
|
||||
|
||||
|
||||
--------
|
||||
|
||||
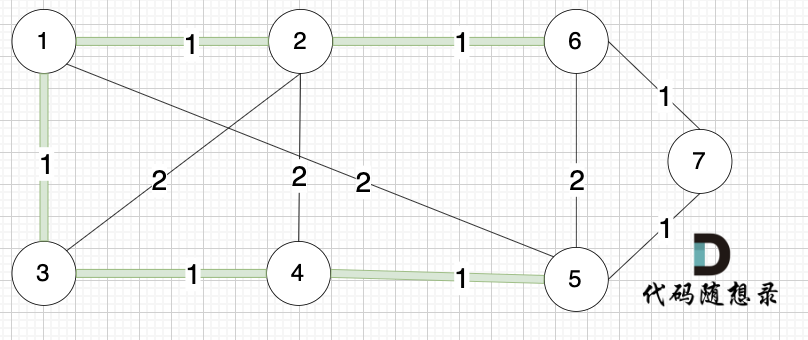
选边(3,4),节点3 和 节点4 不在同一个集合,生成树添加边(3,4),并将节点3,节点4 放到同一个集合。
|
||||
|
||||
|
||||
|
||||
----------
|
||||
|
||||
选边(6,7),节点6 和 节点7 不在同一个集合,生成树添加边(6,7),并将 节点6,节点7 放到同一个集合。
|
||||
|
||||
|
||||
|
||||
-----------
|
||||
|
||||
选边(5,7),节点5 和 节点7 在同一个集合,不做计算。
|
||||
|
||||
选边(1,5),两个节点在同一个集合,不做计算。
|
||||
|
||||
后面遍历 边(3,2),(2,4),(5,6) 同理,都因两个节点已经在同一集合,不做计算。
|
||||
|
||||
|
||||
-------
|
||||
|
||||
此时 我们就已经生成了一个最小生成树,即:
|
||||
|
||||

|
||||
|
||||
在上面的讲解中,看图的话 大家知道如何判断 两个节点 是否在同一个集合(是否有绿色的线连在一起),以及如何把两个节点加入集合(就在图中把两个节点连上)
|
||||
|
||||
**但在代码中,如果将两个节点加入同一个集合,又如何判断两个节点是否在同一个集合呢**?
|
||||
|
||||
这里就涉及到我们之前讲解的[并查集](https://www.programmercarl.com/%E5%9B%BE%E8%AE%BA%E5%B9%B6%E6%9F%A5%E9%9B%86%E7%90%86%E8%AE%BA%E5%9F%BA%E7%A1%80.html)。
|
||||
|
||||
我们在并查集开篇的时候就讲了,并查集主要就两个功能:
|
||||
|
||||
* 将两个元素添加到一个集合中
|
||||
* 判断两个元素在不在同一个集合
|
||||
|
||||
大家发现这正好符合 Kruskal算法的需求,这也是为什么 **我要先讲并查集,再讲 Kruskal**。
|
||||
|
||||
关于 并查集,我已经在[并查集精讲](https://www.programmercarl.com/%E5%9B%BE%E8%AE%BA%E5%B9%B6%E6%9F%A5%E9%9B%86%E7%90%86%E8%AE%BA%E5%9F%BA%E7%A1%80.html) 详细讲解过了,所以这里不再赘述,我们直接用。
|
||||
|
||||
本题代码如下,已经详细注释:
|
||||
|
||||
```CPP
|
||||
|
||||
#include <iostream>
|
||||
#include <vector>
|
||||
#include <algorithm>
|
||||
|
||||
using namespace std;
|
||||
|
||||
// l,r为 边两边的节点,val为边的数值
|
||||
struct Edge {
|
||||
int l, r, val;
|
||||
};
|
||||
|
||||
// 节点数量
|
||||
int n = 10001;
|
||||
// 并查集标记节点关系的数组
|
||||
vector<int> father(n, -1); // 节点编号是从1开始的,n要大一些
|
||||
|
||||
// 并查集初始化
|
||||
void init() {
|
||||
for (int i = 0; i < n; ++i) {
|
||||
father[i] = i;
|
||||
}
|
||||
}
|
||||
|
||||
// 并查集的查找操作
|
||||
int find(int u) {
|
||||
return u == father[u] ? u : father[u] = find(father[u]); // 路径压缩
|
||||
}
|
||||
|
||||
// 并查集的加入集合
|
||||
void join(int u, int v) {
|
||||
u = find(u); // 寻找u的根
|
||||
v = find(v); // 寻找v的根
|
||||
if (u == v) return ; // 如果发现根相同,则说明在一个集合,不用两个节点相连直接返回
|
||||
father[v] = u;
|
||||
}
|
||||
|
||||
int main() {
|
||||
|
||||
int v, e;
|
||||
int v1, v2, val;
|
||||
vector<Edge> edges;
|
||||
int result_val = 0;
|
||||
cin >> v >> e;
|
||||
while (e--) {
|
||||
cin >> v1 >> v2 >> val;
|
||||
edges.push_back({v1, v2, val});
|
||||
}
|
||||
|
||||
// 执行Kruskal算法
|
||||
// 按边的权值对边进行从小到大排序
|
||||
sort(edges.begin(), edges.end(), [](const Edge& a, const Edge& b) {
|
||||
return a.val < b.val;
|
||||
});
|
||||
|
||||
// 并查集初始化
|
||||
init();
|
||||
|
||||
// 从头开始遍历边
|
||||
for (Edge edge : edges) {
|
||||
// 并查集,搜出两个节点的祖先
|
||||
int x = find(edge.l);
|
||||
int y = find(edge.r);
|
||||
|
||||
// 如果祖先不同,则不在同一个集合
|
||||
if (x != y) {
|
||||
result_val += edge.val; // 这条边可以作为生成树的边
|
||||
join(x, y); // 两个节点加入到同一个集合
|
||||
}
|
||||
}
|
||||
cout << result_val << endl;
|
||||
return 0;
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
时间复杂度:nlogn (快排) + logn (并查集) ,所以最后依然是 nlogn 。n为边的数量。
|
||||
|
||||
关于并查集时间复杂度,可以看我在 [并查集理论基础](https://programmercarl.com/%E5%9B%BE%E8%AE%BA%E5%B9%B6%E6%9F%A5%E9%9B%86%E7%90%86%E8%AE%BA%E5%9F%BA%E7%A1%80.html) 的讲解。
|
||||
|
||||
## 拓展一
|
||||
|
||||
如果题目要求将最小生成树的边输出的话,应该怎么办呢?
|
||||
|
||||
Kruskal 算法 输出边的话,相对prim 要容易很多,因为 Kruskal 本来就是直接操作边,边的结构自然清晰,不用像 prim一样 需要再节点练成线输出边 (因为prim是对节点操作,而 Kruskal是对边操作,这是本质区别)
|
||||
|
||||
本题中,边的结构为:
|
||||
|
||||
```CPP
|
||||
struct Edge {
|
||||
int l, r, val;
|
||||
};
|
||||
```
|
||||
|
||||
那么我们只需要找到 在哪里把生成树的边保存下来就可以了。
|
||||
|
||||
当判断两个节点不在同一个集合的时候,这两个节点的边就加入到最小生成树, 所以添加边的操作在这里:
|
||||
|
||||
```CPP
|
||||
vector<Edge> result; // 存储最小生成树的边
|
||||
// 如果祖先不同,则不在同一个集合
|
||||
if (x != y) {
|
||||
result.push_back(edge); // 记录最小生成树的边
|
||||
result_val += edge.val; // 这条边可以作为生成树的边
|
||||
join(x, y); // 两个节点加入到同一个集合
|
||||
}
|
||||
```
|
||||
|
||||
整体代码如下,为了突出重点,我仅仅将 打印最小生成树的部分代码注释了,大家更容易看到哪些改动。
|
||||
|
||||
```CPP
|
||||
#include <iostream>
|
||||
#include <vector>
|
||||
#include <algorithm>
|
||||
|
||||
using namespace std;
|
||||
|
||||
struct Edge {
|
||||
int l, r, val;
|
||||
};
|
||||
|
||||
|
||||
int n = 10001;
|
||||
|
||||
vector<int> father(n, -1);
|
||||
|
||||
void init() {
|
||||
for (int i = 0; i < n; ++i) {
|
||||
father[i] = i;
|
||||
}
|
||||
}
|
||||
|
||||
int find(int u) {
|
||||
return u == father[u] ? u : father[u] = find(father[u]);
|
||||
}
|
||||
|
||||
void join(int u, int v) {
|
||||
u = find(u);
|
||||
v = find(v);
|
||||
if (u == v) return ;
|
||||
father[v] = u;
|
||||
}
|
||||
|
||||
int main() {
|
||||
|
||||
int v, e;
|
||||
int v1, v2, val;
|
||||
vector<Edge> edges;
|
||||
int result_val = 0;
|
||||
cin >> v >> e;
|
||||
while (e--) {
|
||||
cin >> v1 >> v2 >> val;
|
||||
edges.push_back({v1, v2, val});
|
||||
}
|
||||
|
||||
sort(edges.begin(), edges.end(), [](const Edge& a, const Edge& b) {
|
||||
return a.val < b.val;
|
||||
});
|
||||
|
||||
vector<Edge> result; // 存储最小生成树的边
|
||||
|
||||
init();
|
||||
|
||||
for (Edge edge : edges) {
|
||||
|
||||
int x = find(edge.l);
|
||||
int y = find(edge.r);
|
||||
|
||||
|
||||
if (x != y) {
|
||||
result.push_back(edge); // 保存最小生成树的边
|
||||
result_val += edge.val;
|
||||
join(x, y);
|
||||
}
|
||||
}
|
||||
|
||||
// 打印最小生成树的边
|
||||
for (Edge edge : result) {
|
||||
cout << edge.l << " - " << edge.r << " : " << edge.val << endl;
|
||||
}
|
||||
|
||||
return 0;
|
||||
}
|
||||
|
||||
|
||||
```
|
||||
|
||||
按照题目中的示例,打印边的输出为:
|
||||
|
||||
```
|
||||
1 - 2 : 1
|
||||
1 - 3 : 1
|
||||
2 - 6 : 1
|
||||
3 - 4 : 1
|
||||
4 - 5 : 1
|
||||
5 - 7 : 1
|
||||
```
|
||||
|
||||
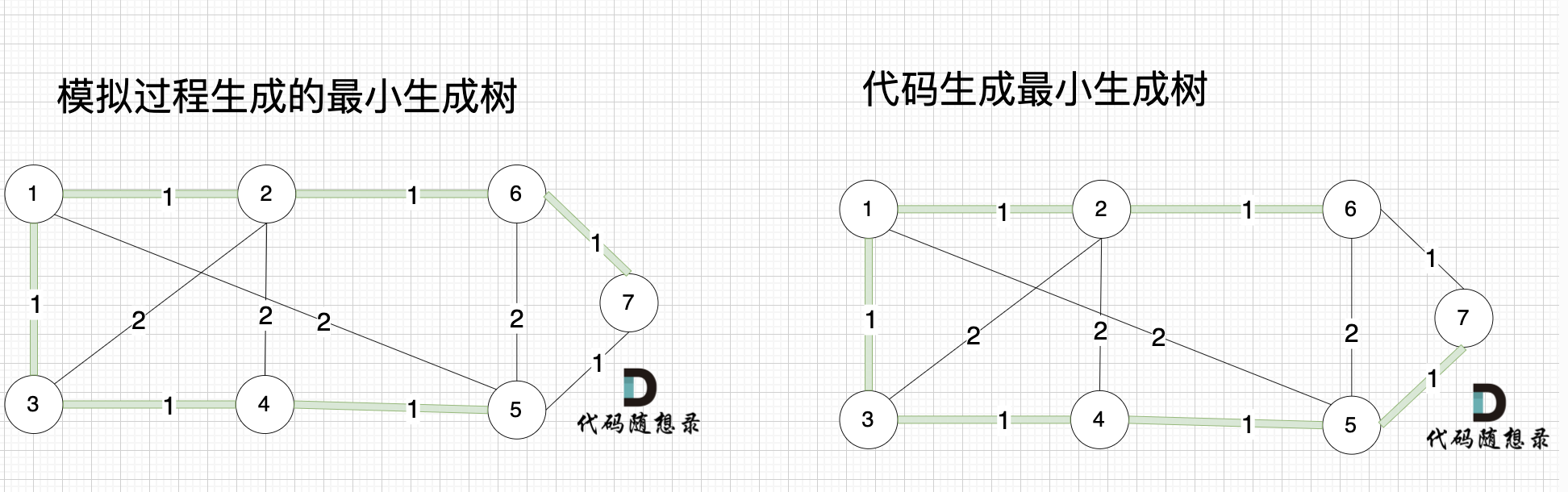
大家可能发现 怎么和我们 模拟画的图不一样,差别在于 代码生成的最小生成树中 节点5 和 节点7相连的。
|
||||
|
||||
|
||||
|
||||
|
||||
其实造成这个差别 是对边排序的时候 权值相同的边先后顺序的问题导致的,无论相同权值边的顺序是什么样的,最后都能得出最小生成树。
|
||||
|
||||
|
||||
## 拓展二
|
||||
|
||||
|
||||
此时我们已经讲完了 Kruskal 和 prim 两个解法来求最小生成树。
|
||||
|
||||
什么情况用哪个算法更合适呢。
|
||||
|
||||
Kruskal 与 prim 的关键区别在于,prim维护的是节点的集合,而 Kruskal 维护的是边的集合。
|
||||
如果 一个图中,节点多,但边相对较少,那么使用Kruskal 更优。
|
||||
|
||||
有录友可能疑惑,一个图里怎么可能节点多,边却少呢?
|
||||
|
||||
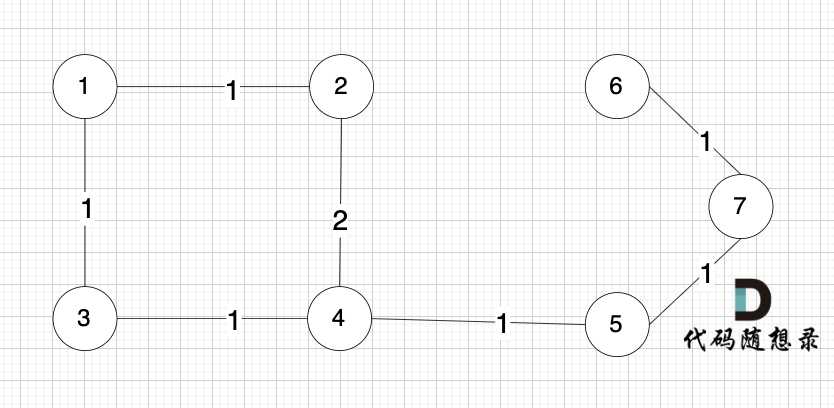
节点未必一定要连着边那, 例如 这个图,大家能明显感受到边没有那么多对吧,但节点数量 和 上述我们讲的例子是一样的。
|
||||
|
||||
|
||||
|
||||
为什么边少的话,使用 Kruskal 更优呢?
|
||||
|
||||
因为 Kruskal 是对边进行排序的后 进行操作是否加入到最小生成树。
|
||||
|
||||
边如果少,那么遍历操作的次数就少。
|
||||
|
||||
在节点数量固定的情况下,图中的边越少,Kruskal 需要遍历的边也就越少。
|
||||
|
||||
而 prim 算法是对节点进行操作的,节点数量越少,prim算法效率就越少。
|
||||
|
||||
所以在 稀疏图中,用Kruskal更优。 在稠密图中,用prim算法更优。
|
||||
|
||||
> 边数量较少为稀疏图,接近或等于完全图(所有节点皆相连)为稠密图
|
||||
|
||||
|
||||
Prim 算法 时间复杂度为 O(n^2),其中 n 为节点数量,它的运行效率和图中边树无关,适用稠密图。
|
||||
|
||||
Kruskal算法 时间复杂度 为 nlogn,其中n 为边的数量,适用稀疏图。
|
||||
|
||||
## 总结
|
||||
|
||||
如果学过了并查集,其实 kruskal 比 prim更好理解一些。
|
||||
|
||||
本篇,我们依然通过模拟 Kruskal 算法的过程,来带大家一步步了解其工作过程。
|
||||
|
||||
在 拓展一 中讲解了 如何输出最小生成树的边。
|
||||
|
||||
在拓展二 中讲解了 prim 和 Kruskal的区别。
|
||||
|
||||
录友们可以细细体会。
|
||||
|
||||
|
||||
@ -5,9 +5,11 @@
|
||||
|
||||
题目描述:
|
||||
|
||||
在世界的某个区域,有一些分散的神秘岛屿,每个岛屿上都有一种珍稀的资源或者宝藏。你是一名探险者,决定前往这些岛屿,但为了节省时间和资源,你希望规划一条最短的路径,以便在探索这些岛屿时尽量减少旅行的距离。
|
||||
在世界的某个区域,有一些分散的神秘岛屿,每个岛屿上都有一种珍稀的资源或者宝藏。国王打算在这些岛屿上建公路,方便运输。
|
||||
|
||||
给定一张地图,其中包括了所有的岛屿,以及它们之间的距离。每个岛屿都需要被至少访问一次,你的目标是规划一条最短路径,以最小化探索路径的总距离,同时确保访问了所有岛屿。
|
||||
不同岛屿之间,路途距离不同,国王希望你可以规划建公路的方案,如何可以以最短的总公路距离将 所有岛屿联通起来。
|
||||
|
||||
给定一张地图,其中包括了所有的岛屿,以及它们之间的距离。以最小化公路建设长度,确保可以链接到所有岛屿。
|
||||
|
||||
输入描述:
|
||||
|
||||
@ -133,7 +135,7 @@ minDist 数组 里的数值初始化为 最大数,因为本题 节点距离不
|
||||
|
||||
1、prim三部曲,第一步:选距离生成树最近节点
|
||||
|
||||
选取一个距离 最小生成树(节点1) 最近的非生成树里的节点,节点2,3,5 距离 最小生成树(节点1) 最近,选节点 2(其实选 节点3或者节点5都可以,距离一样的)加入最小生成树。
|
||||
选取一个距离 最小生成树(节点1) 最近的非生成树里的节点,节点2,3,5 距离 最小生成树(节点1) 最近,选节点 2(其实选 节点3或者节点2都可以,距离一样的)加入最小生成树。
|
||||
|
||||
2、prim三部曲,第二步:最近节点加入生成树
|
||||
|
||||
@ -272,6 +274,8 @@ minDist数组已经更新了 所有非生成树的节点距离 最小生成树
|
||||
```CPP
|
||||
#include<iostream>
|
||||
#include<vector>
|
||||
#include <climits>
|
||||
|
||||
using namespace std;
|
||||
int main() {
|
||||
int v, e;
|
||||
@ -296,28 +300,28 @@ int main() {
|
||||
for (int i = 1; i < v; i++) {
|
||||
|
||||
// 1、prim三部曲,第一步:选距离生成树最近节点
|
||||
int cur = -1; // 选中哪个节点 加入最小生成树
|
||||
int cur = -1; // 选中哪个节点 加入最小生成树
|
||||
int minVal = INT_MAX;
|
||||
for (int j = 1; j <= v; j++) { // 1 - v,顶点编号,这里下标从1开始
|
||||
// 选取最小生成树节点的条件:
|
||||
// 选取最小生成树节点的条件:
|
||||
// (1)不在最小生成树里
|
||||
// (2)距离最小生成树最近的节点
|
||||
// (3)只要不在最小生成树里,先默认选一个节点 ,在比较 哪一个是最小的
|
||||
// 理解条件3 很重要,才能理解这段代码:(cur == -1 || minDist[j] < minDist[cur])
|
||||
if (!isInTree[j] && (cur == -1 || minDist[j] < minDist[cur])) {
|
||||
// (2)距离最小生成树最近的节点
|
||||
if (!isInTree[j] && minDist[j] < minVal) {
|
||||
minVal = minDist[j];
|
||||
cur = j;
|
||||
}
|
||||
}
|
||||
// 2、prim三部曲,第二步:最近节点(cur)加入生成树
|
||||
// 2、prim三部曲,第二步:最近节点(cur)加入生成树
|
||||
isInTree[cur] = true;
|
||||
|
||||
// 3、prim三部曲,第三步:更新非生成树节点到生成树的距离(即更新minDist数组)
|
||||
// cur节点加入之后, 最小生成树加入了新的节点,那么所有节点到 最小生成树的距离(即minDist数组)需要更新一下
|
||||
// 由于cur节点是新加入到最小生成树,那么只需要关心与 cur 相连的 非生成树节点 的距离 是否比 原来 非生成树节点到生成树节点的距离更小了呢
|
||||
for (int j = 1; j <= v; j++) {
|
||||
// 更新的条件:
|
||||
// (1)节点是 非生成树里的节点
|
||||
// (2)与cur相连的某节点的权值 比 该某节点距离最小生成树的距离小
|
||||
// 很多录友看到自己 就想不明白什么意思,其实就是 cur 是新加入 最小生成树的节点,那么 所有非生成树的节点距离生成树节点的最近距离 由于 cur的新加入,需要更新一下数据了
|
||||
// 由于cur节点是新加入到最小生成树,那么只需要关心与 cur 相连的 非生成树节点 的距离 是否比 原来 非生成树节点到生成树节点的距离更小了呢
|
||||
for (int j = 1; j <= v; j++) {
|
||||
// 更新的条件:
|
||||
// (1)节点是 非生成树里的节点
|
||||
// (2)与cur相连的某节点的权值 比 该某节点距离最小生成树的距离小
|
||||
// 很多录友看到自己 就想不明白什么意思,其实就是 cur 是新加入 最小生成树的节点,那么 所有非生成树的节点距离生成树节点的最近距离 由于 cur的新加入,需要更新一下数据了
|
||||
if (!isInTree[j] && grid[cur][j] < minDist[j]) {
|
||||
minDist[j] = grid[cur][j];
|
||||
}
|
||||
@ -325,14 +329,17 @@ int main() {
|
||||
}
|
||||
// 统计结果
|
||||
int result = 0;
|
||||
for (int i = 2; i <= v; i++) { // 不计第一个顶点,因为统计的是边的权值,v个节点有 v-1条边
|
||||
for (int i = 2; i <= v; i++) { // 不计第一个顶点,因为统计的是边的权值,v个节点有 v-1条边
|
||||
result += minDist[i];
|
||||
}
|
||||
cout << result << endl;
|
||||
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
时间复杂度为 O(n^2),其中 n 为节点数量。
|
||||
|
||||
## 拓展
|
||||
|
||||
上面讲解的是记录了最小生成树 所有边的权值,如果让打印出来 最小生成树的每条边呢? 或者说 要把这个最小生成树画出来呢?
|
||||
@ -406,6 +413,8 @@ for (int j = 1; j <= v; j++) {
|
||||
```CPP
|
||||
#include<iostream>
|
||||
#include<vector>
|
||||
#include <climits>
|
||||
|
||||
using namespace std;
|
||||
int main() {
|
||||
int v, e;
|
||||
@ -426,11 +435,14 @@ int main() {
|
||||
|
||||
for (int i = 1; i < v; i++) {
|
||||
int cur = -1;
|
||||
for (int j = 1; j <= v; j++) {
|
||||
if (!isInTree[j] && (cur == -1 || minDist[j] < minDist[cur])) {
|
||||
int minVal = INT_MAX;
|
||||
for (int j = 1; j <= v; j++) {
|
||||
if (!isInTree[j] && minDist[j] < minVal) {
|
||||
minVal = minDist[j];
|
||||
cur = j;
|
||||
}
|
||||
}
|
||||
|
||||
isInTree[cur] = true;
|
||||
for (int j = 1; j <= v; j++) {
|
||||
if (!isInTree[j] && grid[cur][j] < minDist[j]) {
|
||||
@ -440,11 +452,12 @@ int main() {
|
||||
}
|
||||
}
|
||||
}
|
||||
// 输出 最小生成树边的链接情况
|
||||
// 输出 最小生成树边的链接情况
|
||||
for (int i = 1; i <= v; i++) {
|
||||
cout << i "->" parent[i] << endl;
|
||||
cout << i << "->" << parent[i] << endl;
|
||||
}
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
按照本题示例,代码输入如下:
|
||||
@ -1,4 +1,6 @@
|
||||
|
||||
# 23种设计模式精讲 | 配套练习题 | 卡码网
|
||||
|
||||
关于设计模式的学习,大家应该还是看书或者看博客,但却没有一个边学边练的学习环境。
|
||||
|
||||
学完了一种设计模式 是不是应该去练一练?
|
||||
|
||||
Reference in New Issue
Block a user